





















桁架机械手控制系统设计
摘要:随着“中国制造2025”的提出,我国的自动化技术也在进步和创新,基于自动化技术的工业机器人技术已成为当前运用的主流方向,在各家工厂中被广泛地应用于工件的搬运、分拣和上下料等领域。此课题基于x,y,z三轴的桁架机械手机器人,本文首先对机器人的元件选型,运行原理和性能指标进行了,其运行原理是利用机PLC系统对工作区范围内的工件位置进行定位,获取相应数据并进行处理,再把数据通过工作网络传给机器人控制器,并通过伺服系统驱动x,y,z三轴桁架机械手完成工作任务;然后再根据控制要求,分析设计了桁架机械手机器人控制系统机械结构、硬件电路和软件编程,然后讨论其的优化应用。
关键词:搬运;桁架机械手;控制系统
Design of Truss Manipulator Control System
Abstract: with the continuous improvement of the development level of control system in our country, the technology of industrial robot based on automation technology has become the main direction of current application. It is widely applied in various fields such as work piece handling, sorting and loading and unloading. This paper is based on the x, y, x mobile phone is three axis mechanical truss, this paper first component selection of the robot, operation principle and performance indicators, the operation principle is used for locating the work piece position machine PLC system on the work area within the scope of obtaining and processing data, then sends the data to a the robot controller through the network, and through the servo driving system of x, y, z three axis truss manipulator to complete the task; then according to the control requirements, analysis and design of the robot control system of mobile phone truss machinery mechanical structure, hardware circuit and software programming, and then discuss the application of optimization.
Key words: handling; truss manipulator; control system
第一章 绪论
1.1 选题背景与研究意义
桁架机械手既是一种较为常用的三坐标机器人,也可以被称作直角机器人和龙门架机器人,是一种随着我国自动化技术的发展而产生的机械化、自动化的现代新型生产设备。桁架机械手也及是一种被广泛运用于各大企业的工业机器人,机器人技术的研究的出现时间还很短, 是由美国的戴沃尔与20世纪四十年代首先提出,并由美国英格伯格和德沃尔首先制造出来了世界上第一台工业机器人,此时工业机器人技术才真正踏上历史打大舞台。由于我国相关的技术发展较晚,因此工业机器人的起步也相对较晚,在上世纪的70年代,我国才意识到工业机器人技术的重要性,才开始着力于工业机器人技术的研究,其主要原因是随着我国不断的科技革新与技术发展,人力资源优势渐渐下降,而且市场对产品的要求也在逐年提高,并且现阶段人口开始出现老龄化,各大企业的劳动力成本也就逐步提高了,而工业机器人技术也就逐步受到重视,它不仅可以替代一些高危工作,保护工人安全,还可以提高产品的效率和质量,现下各大企业也在着力发展此技术。
随着时代的不断前进,国家制造业和科技水品的发展,工业机器人技术已渐渐成为一项工业中一种不可替代的重要技术。于2016年,李克强总理提出的《中国制造2025》,其中明确指出工业机器人技术将会成为之后重点发展的领域之一,随之而来的问题也就出现了,由于工业机器人技术的不断发展和进步,在技术人员的储备上便有点跟不上它的发展了,但由于我国各地的职业学校在工业机器人方面处在一个发展较为不全面的地步,不能完全满足快速发展技术。因此本次我定的这个课题,是以桁架机械手及直角机器人为根本,通过硬件和软件的设计,来实现机器人的机械化、自动化,可以使学生能更加生动和自主的学习工业机器人技术,从而增加学习的丰富性,提升学生对学习的兴趣。
1.2 研究现状
本课题是基于桁架机械手及直角机器人为基础的工业机器人,其分别以x轴、y轴、z轴三轴运动,各轴之间相对独立,可以通过plc程序和伺服驱动系统可以分别使各轴之间进行独立运动,并通过z轴末段的驱动执行器进行相应的
操作。
桁架机械手机器人先在被广泛运用于各大企业中,是一项较为传统的工业机器人技术,被运用于各式生产线上,通过气压传动装置或者液压传动装置控制机械手爪对物料进行上下搬运,因其可以组合多样,搬运时可以长距离高负载,精度较高,价格也相对便宜,且工作寿命长,可进行各式的扩展能力较强,所以倍受各大企业的喜爱。
桁架机械手简称直角机器人,其类别有很多,它可以按自由度、机械结构、用途等类别分类,现在国内较常用的是一些直角机器人,直角机器人的扩展功能较为广泛,通过更换其z轴末端的执行器,可以用于焊接、装配、打磨、码垛等功能。
现今在各地的工科类学校都普遍采用码垛型的直角机器人用于教学,学生们可以通过在校期间对该类机器人的学习和使用,对该类机器人可以得带较为全面的了解,以便于学生在以后离开校园进入各大企业能较为快速的对该类别机器人的操作上手,实现学校与企业之间的对接。
1.3 研究内容
本课题基于桁架机械手机器人的控制系统进行研究,通过对信捷plc和伺服驱动系统,对其进行选型、研究和设计。所以,本课题的主要研究的方面如下:
1.桁架机械手机器人的总体设计
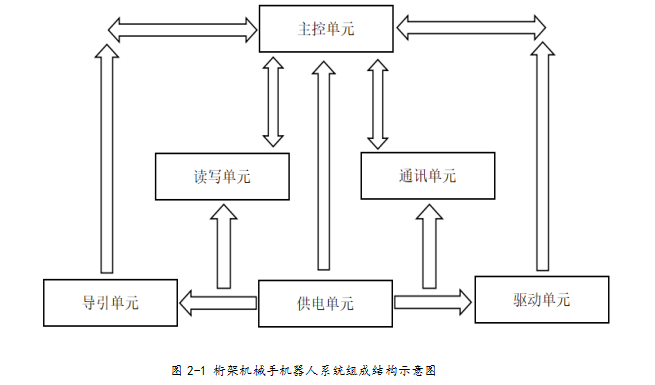
桁架机械手即是简单的工作型机器人,它是基于三坐标来进行相关工作的机器人,它的系统主要有plc控制系统和伺服驱动系统,它通过plc控制伺服驱动器完成所设定的动作。
2.机器人硬件结构的选型
信捷公司作为我国的自主企业,其公司旗下的plc和伺服驱动系统有自己独有的特点,对其的选型也是有各自的有特点。
3.机器人控制软件的设计
桁架机械手机器人的控制软件系统在其硬件被满足的情况下,通过对其软件的设计,来满足我们所需完成的动作,从而完成任务。
目录
第一章 绪论 1
1.1 选题背景与研究意义 1
1.2 研究现状 1
1.3 研究内容 2
第二章 桁架机械手总体结构设计 3
2.1 桁架机械手机器人概述 3
2.1.1 系统组成 3
2.1.2 工作原理 3
2.1.3 技术特点 4
2.2 桁架机械手机械结构设计 5
2.2.1 桁架机械手三轴结构设计 5
2.2.2 桁架机械手传动机构设计 5
第三章 桁架机械手系统硬件设计 10
3.1 总体结构设计 10
3.2 PLC比较和选型 11
3.2.1 PLC的概述 11
3.2.2 信捷XC3系列PLC 11
3.3 伺服和控制器的选型 14
3.3.1 伺服的选型 14
3.3.2 控制器的选型 17
3.4 示教器 18
3.5 各硬件的相关接线 19
3.5.1 驱动单元接线图 19
3.4.2 控制单元接线图 20
第四章 桁架机械手机器人软件设计 21
4.1 软件需求分析 21
4.2 桁架机械手控制系统输入输出定义 21
4.3 系统流程图设计 22
4.4 桁架机械手软件主要功能编程实现 26
4.4.1 桁架机械手主程序 26
4.4.2 桁架机械手运动控制程序 27
第五章 桁架机械手机器人系统调试 33
5.1 桁架机械手软件调试 33
5.2 桁架机械手系统联调 33
第六章 总结 34
致 谢 35
参考文献 36
参考文献
1.张爱红.工业机器人应用与编程技术[M]. 北京:电子工业出版社,2015.
2.信捷电气. RC 系列机器人控制器用户手册. 2015.
3.信捷电气. DS3E系列PFA型伺服驱动器用户手册. 2015.
4.信捷电气. TouchWin编辑软件用户手册. 2015.
5.吴明清,王真. 机械设计基础与实践[M].北京:北京大学出版社,2010.
6.郭琼. PLC应用技术[M].北京: 机械工业出版社,2014.
7 张豪. 二轴桁架机器人控制系统的设计[J].无锡.2017
8.王学良.基于PLC的机械手自动上下料控制系统设计[J].无锡.2016



