








基于Altium Designer PCB应用软件的智能扫地机器人的设计
摘要:如今,随着人工智能飞快发展,各种不同的类型智能机器人不断的出现在人们的日常生活,有效的提高了人们的生活水平。在日常生活中人们在处理琐碎的家务时通常会浪费很大的精力和时间。智能室内扫地机器人就是在这样的需求环境里诞生的,室内扫地机器人的技术核心是应用于传感器对规定的区域来进行扫描最终找到最有效的规划路径来。再在这条有效的路径里能够找出一条从刚开始的地方并且要经过能够到达的点位到最终停止的连续路线,而在这期间它是使用红外传感器来对环境信息进行采集的。硬件上以AT89C51单片机为中心处理来自传感器所提供的室内环境且在遇到障碍物时可以进行回避完成扫地任务。
关键词:人工智能;机器人;传感器;规划路径
Design of a Sweeping robot
Absrract: Nowadays, with the rapid development of artificial intelligence, various types of intelligent robots are constantly appearing in people's daily life, and it has a great effect on improving people's living standard. In daily life, people usually waste a lot of energy and time in dealing with trivial housework. The intelligent indoor sweeping robot is born in such a demand environment. The core of the technology of the indoor sweeping robot is to use the sensor to scan the specified area to find the most effective planning path. In this effective path, you can find a continuous route from the beginning to the point where you can reach the point to the final stop, and during this time it uses an infrared sensor to collect environmental information. On the hardware, the AT89C51 MCU is used as the center to deal with the indoor environment provided by the sensor and can avoid the sweeping task in case of obstacles.
Keywords: Artificial intelligence;Robot;sensor; Path planning
一、选题简介、意义
智能家居概念的产生随着科技的不断进步,家居智能化越来越受到人们的欢迎。首当其中的就是家庭智能扫地机器人,它是一种智能扫地、吸尘工具,是一种应用了代码编程的智能电动保洁设备,它能够按照人类的设置清洁房间的某一部分或全部。
家庭智能扫地机器人相对于传统吸尘器的优点在于:省时、方便、噪音小、便于操作,只要进行简单的设定整个清洁过程中就再也不需要去控制,为上班工作的人减轻做家务的负担。其次还可以对室内空气进行温湿度监测,让您对自己的生活化境可以了如指掌,住的更舒心、更安全。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
(一)课题研究
基于开源技术的家庭机器人管家设计
(二)主要研究内容
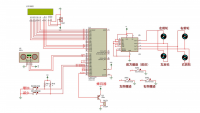
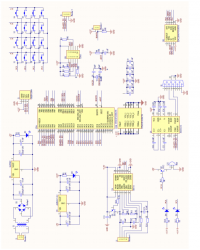
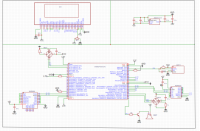
利用Altium Designer PCB应用软件设计出智能扫地机器人的电路图以及对其进行组装设计
1、熟悉了解Altium Designer软件环境以及各菜单的主要功能,并能够熟练操作运用;
2、了解各个元器件封装以及引脚功能;
3、查阅资料了解所需传感器的工作原理以及各中门电路之间的引脚的用法和接法;
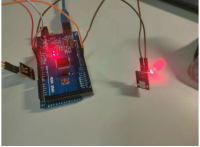
4、完成机器人的制作后的检测与调试;
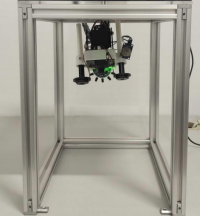
5机器人的外观设计与组装。
(三)要解决的问题
1、能够对灰尘进行识别并进行清扫;
2、在清扫过程中可以一边进行清扫一边进行对日期、时间、天气等进行播报;
3、可以设置不同的清扫模式;
4、具有防碰撞、每次青少玩灰尘后都可以自动返回充电等功能;
5、当尘灰盒满时可以对主人进行提示、
6、能够进行无线控制功能。
(四)预期目标
1、通过 Altium Designerh 绘制的版图能够制作完成实板
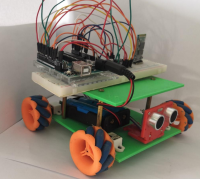
2、机器人能够顺利完成组装
3、程序少些完成后,智能扫地机器人能够运行完成清扫灰尘等任务
(五)研究步骤
第一阶段:查阅各种资料对各门电路的型号与规格进行选择,对所需要的软件进行下载,进行机器人的原理图的绘制,撰写开题报告;
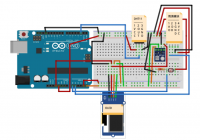
第二阶段:确定所需的应用系统的要求,对软、硬件的选择组合,最后进行机器人的制作;
第三阶段:进行软硬件联合仿真;
第四阶段:整理资料,完成毕业设计,为毕业答辩做好准备。
目录
第一章 绪论 1
1.1课题研究的背景及意义 1
1.2 室内智能扫地机器人国内外研究现状 1
1.3 室内智能扫地机器人的优点 2
第二章 系统的总体设计 3
2.1 智能扫地机器人的功能介绍 3
2.1.1 清洁功能 3
2.1.2 自动充电功能 3
2.1.3 LCD液晶显示 3
2.1.4 防碰、跌落撞功能 3
2.2 智能扫地机器人总体设计 3
2.3 系统的总体框图 4
2.4智能扫地机器人的工作流程 5
第三章 系统的硬件设计 6
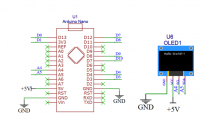
3.1 AT89C51单片机简介 6
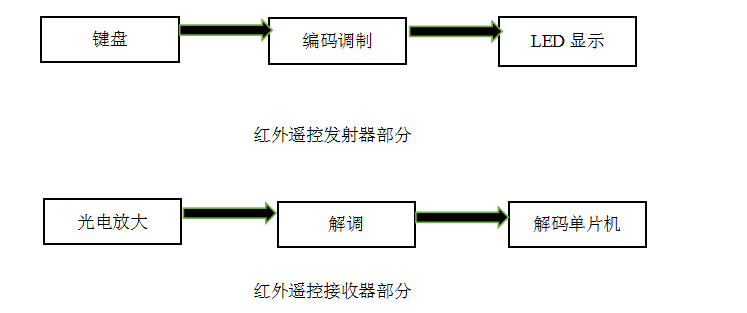
3.2 红外遥控模块 7
3.3 蓝牙无线通信 8
3.4 温度信息采集 9
3.5 碰撞检测模块 10
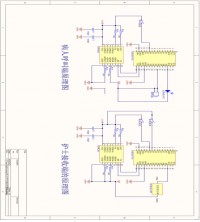
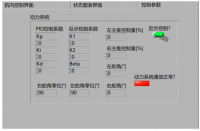
3.6 驱动系统 11
3.6.1 移动驱动电路 13
3.6.2 清扫电机驱动电路 15
3.6.3 电子陀螺仪 16
3.6.4 加速传感器 16
3.7 看门狗 17
3.8 LCD液晶显示 19
第四章 系统的软件设计 21
4.1 系统时钟程序设计 21
4.2 LCD1602的显示控制程序 21
4.3 自动充电系统流程设计 23
4.4 清洁模式流程设计 26
4.5 陀螺仪与加速度计流程设计 24
4.6 停止工作流程 25
第五章 总结与展望 26
致谢 27
参考文献 28
附录 29
参考文献
[1] 李瑞峰,孙迪生等.移动式作业型智能服务机器人的研制.机器人技术与应用.2003,(1):27
[2] 胡跃明,丁伟中,吴祈生,吸尘机器人的研究与展望.计算机测量与控制.3002,10(10):631
[3] 蔡自兴.21世纪机器人技术的发展趋势.南京化工大学学报.2000,22(4):73
[4] 朱世强,刘瑜,庞作伟等.自主吸尘机器人的研究与现状.机器人.2004(6)
[5] 周天.基于嵌入式系统的轮式机器人自主导航技术的研究与实现.西安电子科技大学硕士学位论文,2011
[6] 王慧南.GOS导航原理与应用.北京:科学出版社,2003
[7] 肖南峰. 服务机器人[M]. 北京:清华大学出版社,2013,5-35.
[8] 松井邦彦.传感器应用技巧141例[M].北京:科学出版社.2006
[9] 蔡自兴. 机器人学[M]. 北京:清华大学出版社,2010,13-15.
[10] 付家才.单片机控制工程实践技术[M].北京:化学工业出版社.2004
[11] 朱高峰. 2011-2015年中国智能清洁机器人发展研究与前景预测报告[J]. 中商情报网,2011,38



