








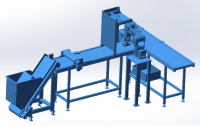
自动抓取堆垛机械手的研制
摘 要
现如今工业机器人已经走进各个厂区,代替工人们进行一些危险、繁重、枯燥的体力劳动。它们可以不眠不休,不知疲惫的工作可以很好的提高工作效率,塑造出安全的工作环境。机械手的应用,使我们的生活越来越便利和智能化。
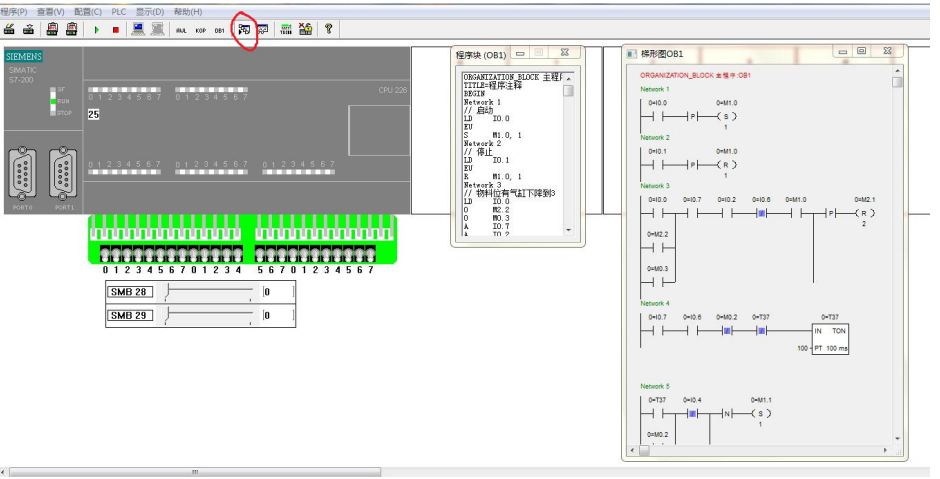
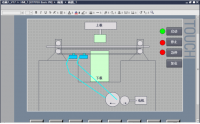
本设计主要是针对机械手在自动抓取堆垛方面的设计。使用西门子的S7-200PLC进行控制,使整个机械手可以对货物进行识别、抓取、运送、堆垛等动作,并且可以达到循环的效果使堆垛工作自动化、无人化。然后用V2.0 S7-200 Explorer的汉化版进行仿真,并对根据仿真现象进行调整以达到控制要求。
本设计主要分为五个章节。第一章绪言是对本课题的来源背景、机械手的相关情况进行阐述。第二章是机械手的总体设计主要是对机械手的驱动方式、抓取方式和动作顺序进行设计。第三章是对机械手的控制系统进行设计主要说了为什么选择西门子S7-200PLC进行控制、变频器的选择和针对不同地方传感器的选用。第四章主要是就仿真现象就行说明并解决。第五章则是程序的解释和I/O分配表。
关键词:自动化;PLC;机械手
Abstract
Nowadays industrial robots have entered various factories to replace workers for dangerous, heavy and boring physical labor. They can be sleepless, and weary work can improve work efficiency and create a safe working environment. The application of manipulator makes our life more and more convenient and intelligent.
This design is mainly aimed at the design of manipulator in automatic grabbing and stacking. The use of SIEMENS S7-200PLC to control, so that the entire manipulator can identify, grab, transport, stacking and other movements, and can achieve the effect of circulation to make the stacking work automated and unmanned. Then, the Chinese version of V2.0 S7-200 Explorer is used to simulate and adjust the simulation phenomenon to meet the control requirements.
This design is divided into five chapters. The first chapter is the introduction to the background of the subject and the related conditions of the manipulator.
The second chapter is the overall design of the manipulator, mainly for the design of the manipulator's driving mode, grasping mode and action sequence. The third chapter is about the design of the control system of the manipulator, which mainly explains why the selection of SIEMENS S7-200PLC, the choice of frequency converter and the selection of sensors in different places. The fourth chapter mainly explains and solves the simulation phenomenon. The fifth chapter is the explanation of the program and the I/O distribution table.
Keywords:automation; PLC; Manipulator
目录
第一章 绪言 1
1.1选题背景和课题来源 1
1.2机械手的发展现状 2
1.3课题研究的内容 2
第二章 机械手的总体设计 4
2.1机械手的驱动方式 4
2.1.1液压驱动与气压驱动 4
2.1.2电动机驱动 4
2.1.3确定驱动方式 5
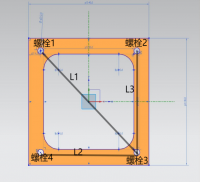
2.2机械手的抓取方式 5
2.3机械手的动作顺序 6
第三章 机械手控制系统的设计 7
3.1 确定PLC型号 7
3.2变频器 8
3.2.1变频器型号的选择 8
3.2.2变频器的参数设定 8
3.3传感器的型号选择 9
3.4 建立控制系统 10
第四章 仿真与调试 18
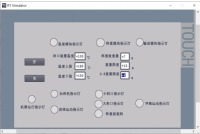
4.1 仿真软件的使用 18
4.2 仿真现象与调整 20
第五章 总结 24
参考文献 25
毕业设计附录目录 26
第一章 绪言
1.1选题背景和课题来源
机械手是工业机器人的重要组成部分。随着计算机的发展和普及,工业机器人的开发与研制已经成为一种发展迅猛的新兴产业。工业机器人的发展也推动者机械手的迅猛发展。机械手可以代替人类去到很多的危险环境,去做哪些危险的工作是人类的安全的到保障。当机械手和机床组合,机床就可以不间断的加工工件。当机械手和生产现结合,那么这条流水线就不会存在停止的问题。当机械手对货物进行堆垛那么货物就会又快又准的出现在它的位置上。机械手的应用可以大幅度的提高工作效率、降低工人受伤的概率、降低制造成本。机械手的发展水平可能直接影响我国的自动化生产水平,无论从经济效益还是技术发展来看,发展机械手都十分的重要,所以机械手的研制有着巨大的意义。
在现代生产过程中,机械手已经被广泛的运用于自动生产线中。虽然机械手的精度目前还无法和人类相比,但是机械手可以代替人们去到那些危险的工作环境中不间断的进行生产,并且机械手还可以稳定的抓住人类无法搬动的货物。因此,机械手的发展状况已受到相关人士的关注,并被用到了越来越多的领域中。由于机械手在生活中的大量运用,使得人类的生产率有了大幅的提高,同时也改善了我们的工作环境.让人类的生活变得越来越智能化。
机械手现如今已经在各个工厂落地生根,而我所在的实习公司最近也在安装一批工业机器人,这些机器人都是多自由度的、有着很高精度的数控工业机器人。而我在用的堆垛机械手,却还是第一代的工业机械手,完全手动每个动作都要按一次按钮,而且堆垛的货无位置还要自己去确定,无比的麻烦。但是我却不得不去用,因为要进行堆垛的货物,要堆垛的货物大概有30KG左右不是特别的沉,但是还要把货物在托盘上堆垛成三层,每层有6个,并且每天要堆垛最少十个托盘的量,真的很累。所以这次课题研究的题目是我结合我现在在用的一代机械手和一些自动化的机械手而进行的研制。争取可以有些自动化不需要繁琐的操作和程序,代替人们进行一些堆垛工作。
1.2机械手的发展现状
机械手身上结合了人和机械的优点,既有着人的信息快速处理并响应的能力,又有着机械的精度和强度等优点的自动化机械装置。机械手是工业机器人的重要组成部分。它是通过编程来完成各种预期的作业任务。
机械手最先出现是在二十世纪六十年代的美利坚共和国,它的结构简单主体只是一个回旋臂,手爪是一块电磁块。由于当时的计算机并不是很发达,所以它的控制系统还是简单的示教型。随后美利坚共和国又在此基础上进行了再创造,并成功调试出了这台名为Unimate(即万能自动)的机械手。值得一提的是这台机械手的机械臂采用了液压驱动,使其可以做出回转、伸缩等动作,它的控制系统也有了些进步是数控示教。
我国机械手的研制晚于那些欧美国家,一直到二十世纪八十年代我国才在上海将第一台机械手研制成功,这台机械手和美利坚共和国的第一台机械手很像也是示教型的。我国的机械手在经过了十余年的开发期后,在90年代我国的机械手已经向实用化的道路上进发。随着计算机的发展与普及,驱动技术的成熟,关键零部件的产出,我国的机械手的到了迅速的发展,到现在已经开始在慢慢普及。
1.3课题研究的内容
机械手一般是由执行机构、驱动部分、控制部分等组成。所以本课题要研究的主要方向也就是这三个部分。
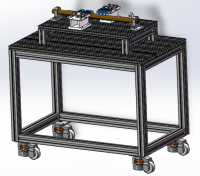
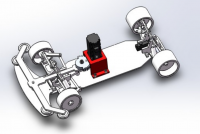
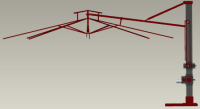
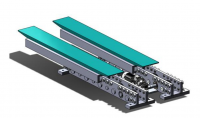
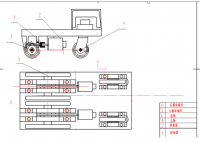
执行机构是机械手对货物进行抓取、搬运、释放等动作的机械结构。执行机构的存在就相当于人类手臂的血肉与骨骼,本设计的执行机构是借鉴一些已经有的机械结构。本部分的研制主要是针对满足机械手逻辑动作需求进行设计。
驱动部分是整个机械手的动力源,给执行机构提供动力完成各个设定动作。驱动部分就相当于人类的肌肉,接受大脑的信号带动执行机构完成指定动作。驱动部分的设计要充分的考虑到现有的硬件条件,选取合适又便宜的动力源。这一部分的研制主要是对驱动方式的确定,抓取方式的确定等方面。
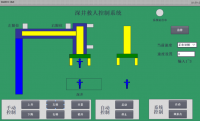
控制部分通过软件对执行机构和动力部分发出动作指令。控制部分的存在就相当于人类的大脑,对其他部分发出动作指令并进行分析。当有了第一部分机械结构的确定和第二部分各种电气元件确定后,就可以根据这些因素建立整个机械手的控制系统。这一部分的研制主要是对程序的编写,信息的处理等方面。
当机械手的执行机构设计完成、驱动部分选取合适、控制系统建立起来后,就可以进行仿真调试了。我们可以在仿真调试的过程之中更为直观准确的发现之前设计的不合理之处并加以改正。
一、选题简介、意义
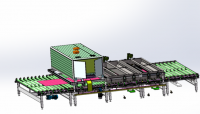
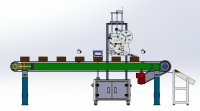
自动抓取堆垛机械手是模仿人类手臂的某些动作,按照一定的顺序对产品进行抓取、搬运并将产品按照一定的堆码要求进行堆放的一种自动化装置。机械手主要组成结构有执行机构、驱动装置和控制系统三部分组成。机械手按工作需要不同,其工作方式可设计成直角坐标式、圆柱坐标式、球坐标式和极坐标式等;机械手按抓取方式不同,有夹持式、托持式和吸附式等;机械手按驱动形式不同,有液压式、气动式和电动式等。控制系统通过协调调控机械手的各个自由度,来控制机械手的运动过程。
自动抓取堆垛机械手的意义在于可以替人工完成繁重枯燥的体力劳动,可以在炎热或者寒冷的环境中保持高效率的工作,保障了工人的人身安全,也提高了企业的工作效率,降低了企业的人工成本。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
主要研究内容:机械手的工作方式、抓取方式、PLC程序的编写、电气元件的选取等。
要解决的问题:1.确定机械手要抓取的产品的大小、重量等参数。
2.根据产品参数选取机械手的驱动装置和执行机构。
3.根据堆垛要求确定机械手动作的逻辑顺序。
4.根据逻辑顺序编写PLC程序。
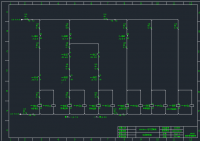
5.绘制接线图。
6.处理好通信,解决各个传感器之间的A/D信号的转换问题。
方法以及措施:1.收集现有的自动抓取堆垛机械手的资料,对其中的优点进行借鉴。
2.确定整体布局,选取驱动装置和执行机构。
3.查阅资料确定电气元件的型号。
三、设计(论文)体系、结构(大纲)
一、了解自动抓取堆垛机械手
1.自动抓取堆垛机械手的发展历程
2.自动抓取堆垛机械手的意义
二、自动抓取堆垛机械手的设计
1.机械手动作的逻辑顺序
2.机械手的工作方式
3.机械手的抓取方式
三、PLC程序编写
1.编写PLC程序
2.电器元件的选取
3.电气原理图、接线图
4.I/O分配表
四、总结
参考文献
[1] 向晓汉.PLC应用技术与实践[M]北京:电子工业出版社,2014.12
[2] 俞云强.传感器与检测技术[M]北京:高等教育出版社,2013.7(2016.12)
[3] 曾文萱.液压与气动控制[M]北京:机械工业出版社,2012.1(2014.6)
[4] 林伟,向晓汉.机械设计基础[M]北京:电子工业出版社,2015.2
[5] 倪森涛,吴伯明,李力夫.机械制造工艺与装备[M]北京:化学工业出版社,2014.6(2017.3)
[6] 向晓汉,宋昕,钱晓忠.变频器与步进/伺服驱动技术完全精通教程[M]北京:电子工业出版社,2014.12
[7] 向晓汉.S7-300/400PLC基础与案例精选[M]北京:机械工业出版社,2010.10(2011.7)
[8] 华智明.电力系统[M]重庆:重庆大学出版社,2005
[9]卞建宇.农业采摘机器人机械臂的结构分析与设计[J]2016。
[10]陆伟.电工与电子技术基础教学[M]成都:电子科技大学出版社,2008.8(2015.2)
[11]张豪.机电一体化设备维修[M]北京:化学工业出版社,2011.1(2017.6)



