






基于MotoSim-EG的工业机器人虚拟示教编程与仿真
摘要:随着自动化发展水平的不断提高,工业机器人在工业生产中的地位越来越重要。本课题受国家战略“中国制造2025”计划的启发。自出现至今短短几十年中,机器人技术的发展取得长足进步,伴随产业变革的兴起和全球竞争格局的全面塑造,机器人展业发展越来越受到世界各国的高度关注。我国工业机器人产业迎来爆发性的发展机遇,然而,现阶段我国制造业面临资源短缺、劳动力成本上升、人口红利减少等压力,而工业机器人的应用与推广,将极大提高生产效率和产品质量,降低生产成本和资源消耗,有效提高我国工业制造竞争力。工业机器人现已广泛应用于汽车及零部件制造,电子、机械加工,模具生产等行业已经实现自动化生产线。
关键词:搬运机器人;工业机器人;示教编程
Virtual Teaching and Programming of Industrial Robot Based on MotoSim-EG
Abstract: With the development of automation, industrial robots play an increasingly important role in industrial production. This topic is inspired by the national strategy "Made in China 2025" plan. In the short decades since its emergence, the development of robotics technology has made great progress. With the rise of industrial change and the overall shaping of global competition pattern, the development of robotics exhibition industry has attracted more and more attention from all over the world. China's industrial robotics industry is facing explosive development opportunities. However, at this stage, China's manufacturing industry is facing the pressure of resource shortage, rising labor costs and reducing population dividends. The application and promotion of industrial robots will greatly improve production efficiency and product quality, reduce production costs and resource consumption, and effectively improve China's industrial manufacturing competitiveness. Industrial robots have been widely used in automobile and parts manufacturing, electronics, mechanical processing, die and other industries have realized automatic production lines.
Key words: handling robot;Industrial Robot;;Teaching Programming
一、概述
1.1工业机器人定义
世界机器人之父恩格尔伯格,机器人还没有被精确定义,但有一点是肯定的,机器人不一定看起来像人,但在美国,不仅可以取代工业和服务业的机器人、机器人和无人驾驶飞行器,还可以取代潜艇、漫游者和机器人巡航导弹。与计算机、自动控制、机械、信息科学、传感器技术、人工智能、仿生学等高科技机器人一起,借助于这个的机制、控制器、伺服系统以及识别和传感器装置来实现的。机器将发挥其优势,在三维空间中,机电设备将发挥不同的功能,它不仅具有快速反应的环境和分析能力,而且机器的长涂抹能力,高精度,经过环境的应用,可分为两类工业机器人,称为工业机器人、工业机器人,就是自由、自由,具有机器人自由度的机器人,通常是指经过指定程序、轨迹等要求后,对工件进行控制和运输的工件。或者操纵自动装置、特种机器人人是非工业、服务性的,包括工业机器人和其他现代机器人:服务性机器人、水下机器人、军用机器人、机器人。在国家标准中,工业机器人被定义为“一种能自动控制情况、能重复、编程、多功能、更自由和操作的机器”。机器人被定义为“与麻省理工和手臂、空间和物体或其他动作机器的类似动作”。当然,机器人是一个机电系统,机器是执行机构,它与组织和电子电子电子设备紧密相连,机器人灵活、动态,直接关系到工作质量。
1.2课题来源及研究意义
这个行业主要是让他们的机器人而不是人类从事一些危险、困难或不长期的工作。随着自动化水平的不断提高,机器人在工业生产中的重要性越来越大。本课题是多年以来国家“中国制造2025”战略提出的,机器人技术的发展已经进行了几十年,随着产业变革的兴起和全球竞争的设计,机器人展览业受到世界各国越来越多的关注。但在这个阶段,中国工业面临着资源短缺、劳动力成本上升、人口红利等压力。工业机器人的应用和推广将大大提高产品的效率和质量。IST广泛应用于汽车、电子、机械制造、供应商等行业,模具及生产均实现了自动化生产。工业机器人在汽车工业中很常见。工业机器人的三维仿真也受到广泛关注。研究了安川电机的离线编程指令-工业仿真软件-机器人电机-电子控制的基本操作。生产、工业-机器人和运动模式显示了一个动画,可以移动机器人进行工业和整体生产,并可以帮助工业-虚拟机器人的设计者。训练-布局、设置优化等。
我国工业界在机器人领域的储备不足,对于企业来说,从机器人行业的基础上,把操作人员转化为高端技术人员的巨大差距往往是缺失的,通过系统的培训和良好的安全应用,工业机器人人才。这迫切需要创建一个新的工业机器人智能制造系统,需求量也大幅增加。对于机器人产业的发展来说,新产业的建设对中国电子产业具有深远的优势,促进产业结构调整和现代化,加快国家建筑建设,改善人民生活条件具有重要意义。但机器人行业的综合知识、企业特点,直接实践时机械成本很高,因此为了培养一流的人才和降低社会成本,每个机器人企业都必须开发一个虚拟教育实践系统,这样不仅成本在职业领域也很好。行业的国际培训——高端人的机器人——以及员工的操作和评估。
1.3工业机器人的技术参数
工业机器人的技术参数是指机器人的规格和发展指标,包括以下几个方面:
1.3.1 分辨率
通过参数工业机器人的系统设计,分辨率也受到位置反馈对Unit.Roboter分辨率和IST性能的影响:编程、分辨率和系统分辨率。
分辨率是指编程程序,最小距离单位,也可以调整ALS基准分辨率。
分辨率IST位置反馈回路检测最小位移。
1.3.2承载能力
可持续性是指工业机器人在工作框架内一个地方的最高质量。可持续性不仅取决于概念的大小和方向、质量以及速度和加速度,负载的能力,以及机器人的质量。
1.3.3精度
机器人工业的精度主要是由机械误差、系统误差引起的。
特别是从机械误差、公共空间和柔性连接误差、误差、误差等方面来说,公共空间是指与关节的最大距离、与机器人的谐波反作用等连接、柔性充电形式。
控制误差是否可以计算主要是通过算法求解直接进入计算机和算法中的字长误差很少。对于控制设计人员来说,由于计算机的精度与误差控制相比非常高,而机构中潜在的误差可以忽略。
系统误差是理想基准分辨率的三分之一。工业机器人的精度是三分之一,可ALS基准分辨率和机械误差。如果能做到这一点,那么组织基准分辨率的误差就可以达到,这样分辨率的精度就可以了,但是,除了代理工业机器人之外,高度是很难达到的。
1.3.4最大工作速度
几家厂商对最高速度的规定内容也略有不同,有的厂商对工业机器人,特别是对自由度的定义,最大的稳定性、速度,但有的厂商最终定义为ARM合成的不同速度,当然这两个庞克,机器人的工业速度和效率。工作效率是质量的提高。但这也意味着企业需要更多的时间来加快或减缓工业机器人的速度,最大速度下的最大加速度和需求的变化也改善了相应的速度。
1.3.5自由度
自由意味着机器人本身拥有与手腕相连的独立轴的数量,例如,手腕通常有三种自由,即分心、倒霉和翻转,但不会张开手和自由。但自由度较高,机械手腕相对较多,运动灵活性较高,宇宙一号,但结构较复杂,刚性较低。
一般来说,机器人在生产中更自由,需要更多的自由度。如果我们允许冗余-自由,如果我们允许更多的灵活性,在反向运动中,机器人将面临电机性能方面的问题。他们可以移动黄色的工作条件的质量。工业机器人,4到6度。
1.3.6工作范围
机器人手臂或手腕末端的所有点,因为机械手形状和尺寸上的所有孔,真的没有安装在机器人的参数上,所以区域的末端是被操纵的。机器人在执行操作时,工作的形式和大小是非常重要的,因为机器人无法够到手,因为这不是操作死区的任务。
1.4国内外工业机器人的研究与应用概况
1.4.1国外工业机器人的研究与应用概况
1954年,美国,制造了第一批可编程机器人的治疗,与工业机器人和专利的概念。1959年,约瑟夫第一批发明者与工业机器人一起,引进了第一家机器人工厂。1978年,美国第一个工业单元机器人公司有通用工业机器人彪马,它给出了一个工业机器人。这意味着工业机器人技术专家已经成熟。
在亚洲,日本是世界上最早的工业发展国家之一,也是麻省理工的机器人制造国之一。1967年,川崎重工有限公司首次从美国引进机器人技术,并于1968年在自己的车间里成为日本第一台机器人。日本工业经过了阶段性的机器人,在实践中迅速。从汽车工业逐渐走向制造业,上世纪80年代,作为日本的第一年,日本开始在每一个机器人“在市场上使用机器人的领域,出现了严重的短缺。社会冲突。1980年至1990年,与日本政府一道,在日本进行机器人产业的研究,也在峰会上。随后,当欧洲、北美和日本的国际市场恢复了短期的低迷,回到了从前的辉煌。此外,日本不仅是一个工业机器人制造商,还包括日本工业机器人公司,如松下,欧在狙击手猎杀,富士和川崎。在欧洲,瑞士也开发了世界上最大的ABB Roboter公司。ABB于1974年成立了世界上第一个电动电池。其产品包括食品、制药、焊接和表面处理。
1.4.2国内工业机器人的研究与应用概况
中国的机器人工业始于20世纪70年代初,经过40年的发展,已经分为三个阶段。70年代萌芽:70年代初,工业机器人的使用在世界上达到了顶峰。在这种情况下,中国在1972年开始发展自己的工业——机器人。何年:80年代,随着改革的推进,机器人的发展“中国麻省理工研究院”得到了政府的重视和支持。“75年”,同时国家雄厚的工业资金“机器人和部分国家解决了这个问题。1985年,HIT带领同行发展了第一台机器人——“华宇一型”到了这样的地步。从机器人预测精度的控制和一些重要的技术途径。目前,国内外焊接技术都是创新型的,以计算机控制的机器人焊接与在线和回放功能为第一应用:重复精度、ACTIO N系列、焊接参数数据等最重要的技术数据,如精度、加载近或说、国际同类产品上的L。埃弗尔1985年底,我国“21495”;在辽宁港亚瑟潜水第一U 60号成功,同时开创了机器人的新时代。开发),也被称为ALS实施中的“项目”,它已经完成了大量的科学研究,并开发了一些特殊的机器人。实践时间:90年代初,中国经济是经济结构和技术进步的新适应。在实践中,中国工业机器人已经朝着电气和树脂的发展迈出了重要的一步。机器人安装图像、切割、处理、包装等多个领域将实施机器人工业,机器人、像中国这样的机器人是上海大学工业基地发展的坚实基础。作为我国第一代高性能智能机器人的诞生地标志,具有第二代机器人技术的发展。
1.5工业机器人的优点
工业机器人的应用具有许多优点,如:
(1)降低成本;
(2)提高生产率;
(3)提高产品质量;
(4)以灵活的生产。
(5)材料的浪费;
(6)控制和库存周转率;
(7)降低成本;
(8)通过危险和恶劣的工作。
机器人-我们行业的应用非常普遍。但在我国,工业基础薄弱,劳动力十分丰富,成本高昂,工业机器人的开发和应用十分困难。只有在我国形势下,才能加快工业机器人的发展和应用。所以,我们要问自己的问题是以下三个:
(1)经济发展机器人将有利于尽快投资。
(2)、开发专用机器人,机器人正在烘干,人力资源无法工作。
可能性市场很大。
(3)对公司的技术重新设计方式,通过机器人,改造老公司等高科技公司,促进机器人技术自身的发展和应用。随着技术的进一步发展和市场的发展,工业机器人的应用越来越广泛,机器人也将被创造出来,如果不是这样的话,可以夸张地说,工业机器人是制造业的一步,标志着现代化,标志着高科技的进步。因此,机器人工业如何设计,一个强大而稳定的工业机器人是一个迫切的问题
1.6本文的主要研究内容
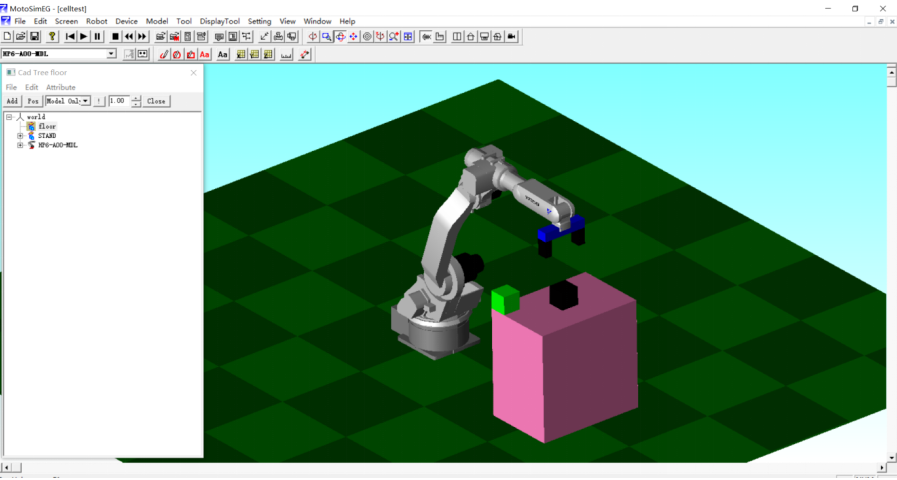
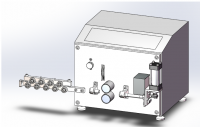
论文是。工业机器人-工业机器人-日本NX100型安川机器人虚拟仿真和虚拟仿真表明,Motosim-EG教师-软件为基础的知识-工业机器人-培训,首先是两个方面:1。工业设计和机器人本身。对于工业来说,机器人是具有结构和控制系统的机器。它们主要是对工业机器人的运动学和动力学、规划和方法的研究,为虚拟仿真软件的类型提供了一种灵活舒适的工作环境。2、一些工业机器人为企业生产的自动化提供了条件,通过这些条件,工业机器人及其工作也可以模拟企业的生产过程。生产环境中,机器人形式是设计在动画、视觉工业、麻省理工人和整个生产、移动和有效的虚拟指令设计师实施的。
关于工业机器人hp6-a00-mdl yaskawa roboter与motosim一起使用的模型-例如通过工业机器人处理对象的虚拟仿真教学软件,工业机器人的可视化就是处理,就像对象一样。操作或生产。仿真采用计算机生成的三维显示和几何图形,由交互式计算机图形技术和机器人技术确定工艺条件和工作条件,动态过程可以缩短制造时间,并通过系统不必要的重复仿真。IRD软件的安装,工业机器人的材料,文章模块安川机器人的布局,技术参数,坐标系,机器人,机器人结构的编程和操作的来料分析。虚拟教学是用于工业机器人的人机界面,机器人可以大部分操作军队的此类软件。
目录
一、概述 2
1.1工业机器人定义 2
1.2课题来源及研究意义 2
1.3工业机器人的技术参数 3
1.3.1 分辨率 3
1.3.2承载能力 3
1.3.3精度 3
1.3.4最大工作速度 4
1.3.5自由度 4
1.3.6工作范围 4
1.4国内外工业机器人的研究与应用概况 4
1.4.1国外工业机器人的研究与应用概况 4
1.4.2国内工业机器人的研究与应用概况 5
1.5工业机器人的优点 5
1.6本文的主要研究内容 6
二、MotoSim-EG软件的安装与设置 8
2.1 编程语言简介 8
2.2软件安装步骤 8
2.2.1 Motosim EG所需环境及硬件密钥 8
2.2.2安装Motosim EG步骤 9
2.3 软件调试系统及打开步骤 9
2.3.1术语定义 9
2.3.2软件打开步骤 9
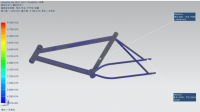
三、基于环境对工业机器人建模 11
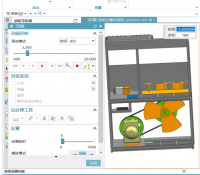
3.1 创建模型软件调试 11
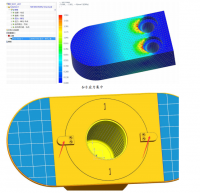
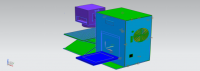
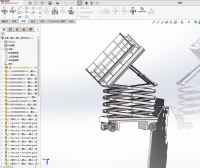
3.2工件以及作台的建立 15
3.2.1创建工作台与工件的流程图: 15
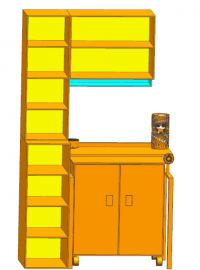
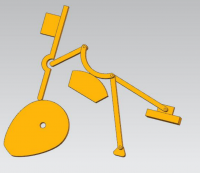
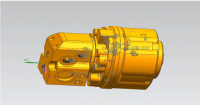
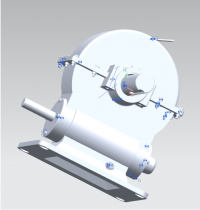
3.3机械手抓模型建立 22
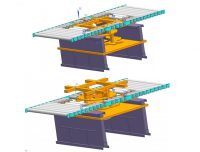
四、基于MotoSim-EG虚拟示教与编程 27
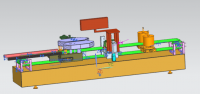
4.1搬运机器人概述 27
4.1.1搬运机器人的系统组成 27
4.1.2搬运机器人的优点 27
4.1.3搬运机器人的分类 28
4.2搬运机器人编程与示教 28
五、总结与展望 33
5.1总结 33
5.2展望 33
致 谢 34
参考文献 34
参考文献
1.夏鲲;徐涛;李静锋;孔斌;;工业机器人的发展与应用研究[J];广西轻工业;2008年08期.
2.唐巍;基于三自由度视觉伺服系统的毽球机器人的研究[D];东北大学;2009年.
3.高微. 苹果包装抓取搬运机械手的研究[D]. 西北农林科技大学,2006.
4.胡坤. 移动机械手运动学分析及仿真[D]. 河北工业大学,2006.
5.孙立宁;;机器人技术国内外发展状况[J];国内外机电一体化技术;2002年04期.
6.李乐新;;串联机器人运动控制方法的研究[J];沈阳航空工业学院学报;2009年03期.
7.付大鹏,黄胜全,赵立华. 机械手运动学方程及优化设计[J]. 机械制造,2004,(4).
8.李素蓉;机器人技术展望[J];兵工自动化;1999年02期.
9.孙英飞;罗爱华;;我国工业机器人发展研究[J];科学技术与工程;2012年12期.
10.吴振彪,王正家,工业机器人[M],武汉:华中科技大学出版社,2006.
11.韩建海,工业机器人[M],武汉:华中科技大学出版社,2009.
12.NX100 INSTRUCTIONS.YASKAWA ELECTRIC CORPORATION,2004.
13.NX100 OPERATOR’S MANUAL FOR HANDLING.YASKAWA ELECTRIC CORPORATION,2003.
14.NX100 MANUAL FOR HANDLING.YASKAWA ELECTRIC CORPORATION,2005
15.Motosim EG OPERATION MANUAL FOR WINDOWS,YASKAWA ELECTRIC CORPORATION,2005.
16.张爱红,张秋菊,机器人示教编程方法[J],组合机床与自动化加工技术,2003(4).
17.张爱红,张秋菊,机器人虚拟示教的实现方法[J],机床与液压,2003(4).
18.张爱红,机器人虚拟示教及远程控制研究[D],无锡:江南大学硕士学位论文,2003.
19.张爱红,等,微机与工业机器人的串行通信研究[J],组合机床与自动化加工技术.



