






手动夹爪机构的建模及运动仿真分析
摘要:该课题题目为手动夹爪的运动建模及运动仿真分析。以手动夹爪机构为研究主体,对其主要机构进行深 度分析,研究主动件的产生的驱动效果,研究主动件是如何带动从动件进一步产生的运动效果,最后决定机构 是怎样的驱动方式和运动方法。利用学过的NX绘图软件进行建模,先绘制草图,在进行绘制三维模型,接着进 行模型的装配,产生动画效果并记录下来,紧接着套用公式进行数据分析,绘制出表格以表达所分析出来的结 果。并完成二维图和具体的说明书。也是对我们所学习的NX,CAD进行检验,进行手动夹爪的理论分析和三维模 型的实际应用等。 关键词:手动夹爪建模;三维建模;运动仿真分析
MotionModelingandMotionSimulationAnalysisofManual Claw; Abstract:Thetopicisaboutthemotionmodelingandsimulationanalysisofmanualgripper.Takingthemanual clawmechanismasthemainbody,thispapermakesadeepanalysisofitsmainmechanism,studiesthedrivingeffectof theactivepart,studieshowtheactivepartdrivesthefollowertofurtherproducethemotioneffect,andfinallydecidesthe drivingmodeandthemotionmethodofthemechanism.UsingthelearnedNXdrawingsoftwaretomodel,firstdrawthe sketch,thendrawthethree-dimensionalmodel,thenassemblethemodel,producetheanimationeffectandrecordit,then applytheformulatoanalyzethedata,drawthetabletoexpresstheresultsoftheanalysis.Andcompletetwo-dimensional drawingsandspecificinstructions.ItalsocheckstheNXandCADwehavelearned,carriesoutthetheoreticalanalysisof manualgripperandthepracticalapplicationofthree-dimensionalmodel,etc. Keywords:manualcentralclaw;three-dimensionalmodeling:;motionsimulation.
第一章 绪论
1.1 研究意义
随着现代科技的迅速发展,各种大小机械已经广泛应用与国计民生的各领
域中,大到机械的加工机床,小到我们日常所用的加工设备,医疗设备,计算机
外围设备等。这些现代科技都在每天的日渐发展中,我们的科学家们工作人员
等每天都在不断地钻研,不断地创新中。对社会的进步非常大的起着铺垫的作
用,为人类的实际发展社会的进步做着重要的努力,为人类的工业发展做着重
大铺垫。
经过了半个世纪的日益发展,我们国家的各个科学技术有了重大的突破,
当然其中就有基本运动数值建模和运动仿真。有成百上万大学校园已经将其运
用在我们大学生日常的学术课堂中,经过了这么多年,运动仿真技术这项科学
技术的日益进步,紧接着运动方正处理事情的方法也是越来越多哦,这样更好
的使我们在实际过程中解决问题有了更多有效性的方法,其中运动仿真具有互
相制作性和可要求性,数字建模和运动仿真技术已经在全国使用方式相似,逐
渐的我们国家已经变成成差不多一样的标准。在仿真系统方面,仿真的主要部
件具有多个层面,在互联络的其中,网络化已经成为现实,更加的接近现代化
的技术网络综合性发展中,仿真运动将是人们研究的主要对象,仿真技术将是
由最初的简单机构,向着复杂的系统机构制度领域进行,为人类的生活生产带
来了有用的东西。
在现代运动仿真中具有很多的优点,第一点;可以预先知道所涉及的机构
能否达到所需要的理想状态。第二点;可以事先对其设计的机构进行检验,能
够有效的测验出所需要的表达效果,使得我们的机械科学更加的标准化和合理
化。使用运动仿真可以实现检验各个装配是否合理,不合理处也可以对其进行
有效的修改,可以避免不必要的加工过程,减少对其器件和零件的损失,以及
对 零件的使用浪费,现在运动仿真已经运用到了各个领域中。对人们科学发展
非常方便。
目录
第一章 绪论..................................................................................................................1
1.1 研究意义.........................................................................................................1
1.2 研究内容.........................................................................................................2
第二章 机构的理论分析和建模装配..........................................................................3
2.1 理论分析.........................................................................................................3
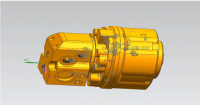
2.2 机构的三维建模.............................................................................................4
2.2.1 手动夹爪螺杆的三维建模.................................................................4
2.2.2 手动夹爪螺母的三维建模.................................................................6
2.2.3 手动夹爪连接块的三维建模.............................................................7
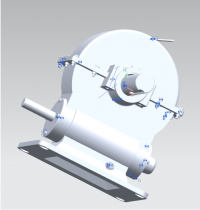
2.3 机构的装配.....................................................................................................9
2.3.1 螺杆及螺母的装配...........................................................................10
2.3.2 连接块及轴的装配...........................................................................11
2.3.3 滑块与滑柱的装配...........................................................................11
2.3.4 手柄及螺钉的装配...........................................................................13
2.4 装配顺序.......................................................................................................13
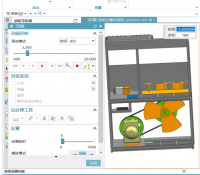
第三章 机构的运动仿真............................................................................................15
3.1 定义连杆.......................................................................................................15
3.1.1 定义螺杆及手柄...............................................................................15
3.1.2 定义螺母及滑柱...............................................................................16
3.1.3 定义左右滑块...................................................................................16
3.1.4 定义连接块及两轴...........................................................................17
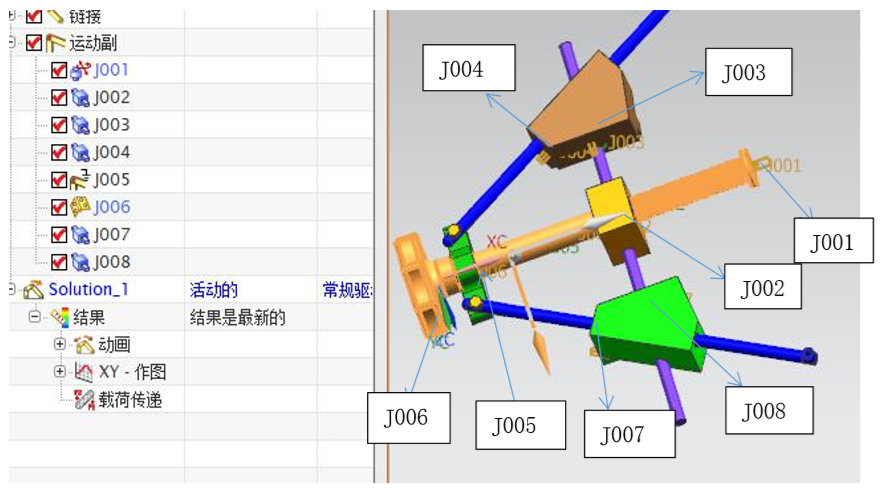
3.2 定义运动副...................................................................................................18
3.2.1 定义柱面副.......................................................................................18
3.2.2 定义滑块副.......................................................................................18
3.2.3 定义旋转副及固定副.......................................................................19
3.3 添加驱动及速度...........................................................................................20
3.4 解算方案及求解...........................................................................................20
第四章 机构的运动仿真分析....................................................................................23
4.1 机构运作的检查...........................................................................................23
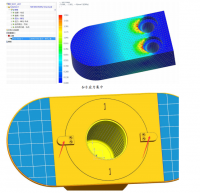
4.1.1 干涉检查...........................................................................................23
4.1.2 测量...................................................................................................24
4.2 设置工作阻力函数.......................................................................................26
4.2.1 添加阻尼...........................................................................................26
4.2.2 分析滑块副位移...............................................................................27
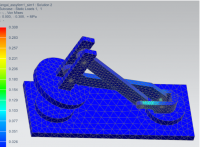
4.3 对仿真结果分析...........................................................................................30
4.3.1 添加矢量力与未添加矢量力分析对比...........................................30
4.3.2 绘制手动夹爪速度、位移曲线.......................................................32
4.3.3 绘制手动夹爪螺杆力的方向曲线...................................................33
第五章 总结................................................................................................................35
致谢..............................................................................................................................36
参考文献......................................................................................................................37
参考文献
[1] 金旭星、朱耀武、李迎吉、王琼.《机械设计基础》. 人民邮电出版社.2016年4月
[2] 胡仁喜、刘昌丽等编著.《UG NX 9.0动力学与有限元分析从入门到精通》北京:机械工业出版社,2014
年10月
[3] 华红芳、孙燕华、刘振宇.《机械制图与零部件测绘》.电子工商业出版社,2005年5月
[4] 孙燕华、芦敏.《AutoCAD机械制图》.机械工业出版社2008年4月
[5] 黄茂林、秦伟.《机械与原理》.机械工业出版社.2007年3月



