





















平面并联机构优化设计
摘 要
并联机构具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点可以作为航天上的对接器、航海上的潜艇救援对接器;工业上可以作为大件的装配机器人、精密操作的微动器;可以在汽车总装线上自动安装车轮部件;另外,医用机器人,天文望远镜等都利用了并联技术。
本文并联机构的研究方向:
(1)并联机构组成原理的研究
研究并联机构自由度计算、运动副类型、支铰类型以及运动学分析、建模与仿真等问题。
(2)并联机构运动空间的研究
包括运动空间分析及仿真、可达工作空间求解(如数值求解法、球坐标搜索法等)、机构干涉计算及位置分析等。
(3)并联机构结构设计的研究
并联机构的结构设计包括很多内容,如机构的总体布局、安全机构设计。
由于本人水平有限,文中的错误和不足在所难免,恳请各位老师给予批评和指正。
关键词:三自由度;虚拟样机;并联机构
Abstract
Parallel mechanism with high rigidity, strong bearing capacity, small error, high precision, small self-weight loading ratio, good dynamic performance, easy control and a series of advantages can be used as a submarine rescue docking docking device, maritime space on; the industry can be used as micro - actuator assembly machines, large precision operation; you can automatically install the wheel assembly in automobile assembly line; in addition, medical robotics, astronomical telescope, using parallel technology.
The direction of the research of parallel mechanism:
(1) study on the principle of parallel mechanism.
The degree of freedom parallel mechanism, motion pair of calculation type, hinge type and kinematic analysis, modeling and Simulation of the.
(2) for parallel mechanism workspace
Including the motion space analysis and simulation, the reachable workspace solution (such as numerical method, sphere coordinate searching method etc.), mechanism of interference analysis and location.
(3) for parallel mechanism structure design
Structure design of parallel mechanism includes many contents, such as the design of general layout, organization security mechanism.
Because of my limited ability, mistakes and shortcomings in this paper can hardly be avoided, ask teachers to give the criticism and correction.
Keywords three degree of freedom parallel mechanism; virtual prototype;
目 录
第1章 前 言 1
1.1 课题研究背景意义 1
1.2 国内外研究现状 2
第2章 三自由度并联的结构及工作原理 5
2.1 并联运动机构概述 5
2.2 三自由度并联的结构及机械运动原理 5
2.3 控制系统结构及工作原理 6
2.4 并联机构工作空间的分析 7
第3章 并联机构主要部件的设计 9
3.1 电动机选型 9
3.1.1电机的分类 9
3.1.2电机的选择 9
3.2 电动推杆选择 10
3.3机构力的计算 13
第4章 平面并联机构优化设计 19
4.1并联机构并联机构机的运动学约束 19
4.1.1 连杆杆长约束 19
4.1.2 运动副转角约束 19
4.1.3 连杆杆间干涉 20
4.2 确定并联机构空间的基本方法 20
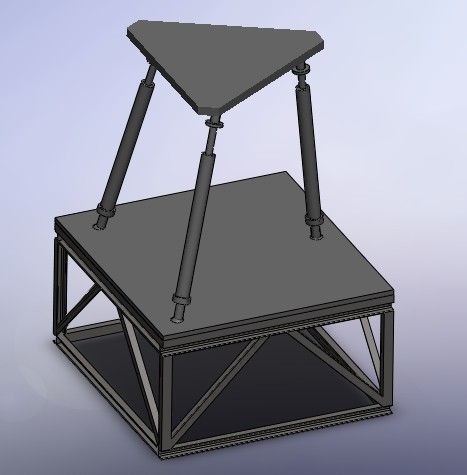
第5章 三自由度并联机构三维建模 21
5.1设计结果 21
5.1并联机构UG三维建模 21
第6章 Adαms建模过程 22
6.1 Adams软件介绍 22
6.1.1 Adams软件简介 22
6.1.2 ADAMS软件基本模块 24
6.2 Adams 建模过程 27
6.2.1 启动ADAMS 28
6.2.2 设置工作环境 28
6.2.3 创建旋转副、移动副、移动驱动、固定约束 29
6.3 仿真结果 32
结 论 34
参考文献 35
致 谢 36
参考文献
[1] John A. Bosch. Coordinate Measuring Machines and Systems. New York: Marcel Dekker Inc. 1995,1-38
[2] 张国雄.三并联机构机[M].天津:天津大学出版社,1999.
[3] 张国雄.三并联机构机的发展趋势[J].中国机械工程,2000,11(1-2): 222-226.
[4] 叶东,黄庆成,车仁生.多关节并联机构机的误差模型[J].光学精密工程,1999,
[8] 中村哲夫.三并联机构机并联机构误差的评价方法[J].国外计量. 1994,2: 8-13.
[9] 林璨.三并联机构机的精度检定与位置误差补偿[J].现代计量测试. 1995,2: 21-24. [10] Oiwa Takaaki. Journal of the Japan Society for Precision Engineering, 1998,64(12):1791
[11] Oiwa Takaaki, et al. Journal of the Japan Society for Precision Engineering, 1999,65(2):288
[12] K. Takamasu and M. Hiraki. Journal of the Japan Society for Precision Engineering, 1997,63(12):1676
[13] 刘得军,车仁生,罗小川.并联机构机新发展——并联运动机构并联机构机[J].光学精密工程,2000,8(5):497-498.
[14] Huang T,et al. Closed form solution of hexapod-based virtual axis machine tools[J]. ASME J. of Mechanical Design,1999,121: 26-31.
[15] 汪劲松,黄田.并联机构——机构行业面临的机遇与挑战[J].中国机械工程, 1999,10(10): 1103-1107.
[16] 刘得军,车仁生,杨玉国,等.三自由度并联并联机构机及其虚拟原型研究[J].中国机械工程,2000,11(3): 252.
[17] 黄真,孔令富,方跃法.并联机器人机构学理论及控制.北京:机械工业出版社,1997:18~21.
http://www.bysj1.com/html/5839.html
http://www.bysj1.com/html/6302.html



