








基于RFID识别技术的搬运机器人研制
摘要:随着工业自动化发展水平的不断提高,机器人在工业生产中的地位显得越来越重要,机器人技术在自动化生产领域的物料搬运等方面的应用日益广泛。本课题以全国职业院校技能大赛“A200自动机器人平台”为基础,开发了基于RFID识别技术的搬运机器人。本课题首先通过阐述基本需求与总体方案,提出了基于RFID识别技术的搬运机器人的技术性能指标,对机器人的机械结构进行了详细的设计分析,并对关键零件进行了有限元分析计算;其次,根据控制要求,确定了控制系统的总体方案,在原有平台基础上扩展相应的单片机硬件系统,并基于模糊控制理论,重点研究了搬运机器人的光学导引控制算法及程序编写;同时针对RFID识别技术的应用进行分析与优化,以达到搬运机器人的识别要求;最后,简要阐述了本课题研制的搬运机器人在2012年全国职业院校技能大赛机器人技术应用赛项中的应用情况。
关键词:搬运机器人;有限元;RFID识别;光学导引
The development of handling robot based on
RFID identification technology
Abstract:With the development of industrial automation level, the robot is playing increasingly important in the industrial production. The robotics is widely applied in the applications of material handling in automation day by day. This paper is based on the national occupational college skills competition "A200 automatic robot platform", and developed a handling robot based on RFID identification technology. First, this paper introduces the basic demand and the overall scheme and presents the index of technical performance of robotics based on RFID identification technology, and analyzes the design of mechanical structure of it , and calculates the finite element analysis of the key parts; Secondly, according to the requirements of the control system, it determines the overall scheme of it, and extends the relevant hardware system of the MCU(Micro controller unit) on the basis of the original platform, and focuses on the research of optical navigation for the control algorithm of the handling robot and programs based on the fuzzy control theory; At the same time the applications of RFID identification technology shall be analyzed and optimized in order to identify the robot requirements; Finally, this paper briefly describes the applications of the handling robot in the competition 2012 national occupation college skills ----- the application of robot technology.
Keywords: handling robot; finite element; RFID identification; optical navigation
第1章 引言
1.1课题来源及研究意义
本课题来源于无锡职业技术学院机器人技术应用学生创新团队建设项目。无锡职业技术学院机器人技术应用学生创新团队主要由我院机器人技术研究所负责指导与建设,主要以各类教学机器人、参赛机器人创新设计与制作为主要工作内容。机器人作为典型的机电一体化产品,目前,已逐渐向基于PC机的开放型控制器方向发展。随着工业自动化发展水平的不断提高,机器人在工业生产中的地位显得越来越重要,在自动化生产领域的物料搬运等方面的应用也日益广泛。
。。。。。。。。
1.2国内外AGV技术发展与研究概况
本课题设计的搬运机器人属于AGV?(Automated Guided Vehicle)机器人,AGV是指装备有电磁或光学导引装置,能够按照规定的导引路线行驶,具有运行和停车装置、安全保护装置以及具有各种移载功能的运输小车。
。。。。。
1.2.1 国外AGV技术发展与现状
近年来,AGV和AGVS(AGV System)在日本、德国、美国、瑞典等国家发展很快,有的制造企业已实现了从原材料管理到成品出厂的全过程自动引导车系统。特别是日本,随着自动化程度的不断提高,其AGV的保有量,每年均以20%的比率增长。
。。。。。。。
1.2.2 国内AGV技术发展与现状
我国AGV发展历程较短,AGV长期依赖进口,但随着经济发展,国家一直在不断加大在这一领域的投入,经过不懈地努力也取得了一定的成效,如北京起重运输机械研究所、清华大学、中国邮政集团邮政科学研究规划院、中国科学院沈阳自动化所、国防科技大学、大连组合机床研究所和上海交通大学都在进行不同类型的AGV的研制并小批投入生产。目前,国内AGV S保有量在200套左右,AGV在500台左右。
。。。。。。
1.3本课题的主要研究内容
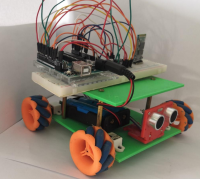
本课题是以2012年全国职业院校机器人技术应用赛项为设计依据,以“A200自动机器人平台”为基础开发“基于RFID识别技术的搬运机器人”。根据项目需求,该机器人主要实现机器人循线行走功能、机械手取放工件功能、RFID识别功能。
基于此,本课题的设计内容主要包括以下几个方面:
1.搬运机器人的总体结构设计;
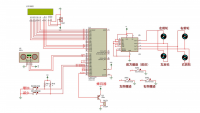
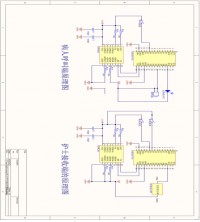
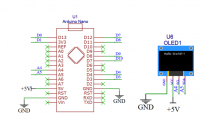
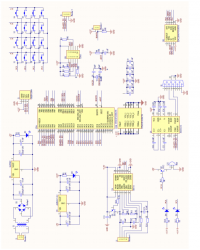
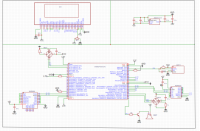
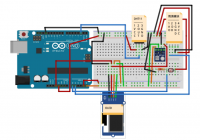
2.搬运机器人控制系统的硬件构成及控制板电路扩展设计;
3.搬运机器人控制系统的软件设计;
4.RFID识别技术应用分析;
5.搬运机器人在全国职业院校技能大赛中的应用。
第2章 基于RFID识别技术的搬运机器人总体结构
2.1 搬运机器人概述
2.1.1技术特点
“A200自动机器人平台”提供了基础行走底盘与STC单片机主控制板,即平台只具备一个基础行走功能与主控制器.
目 录
第1章 引言 ………………………………………………………………………1
1.1课题来源及研究意义………………………………………………………1
1.2国内外AGV研究与应用概况 ……………………………………………1
1.2.1国外AGV技术发展与现状 ………………………………………1
1.2.2国内AGV技术发展与现状 ………………………………………2
1.3本文的主要研究内容………………………………………………………3
第2章 基于RFID识别技术的搬运机器人总体结构……………………………4
2.1搬运机器人概述 …………………………………………………………4
2.1.1 技术特点 …………………………………………………………4
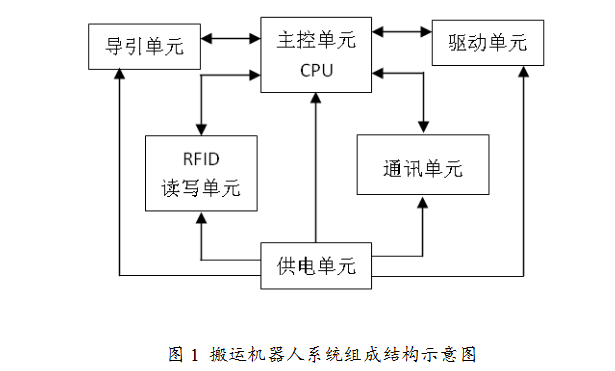
2.1.2系统组成 …………………………………………………………4
2.1.3技术指标 …………………………………………………………5
2.2 搬运机器人机械结构设计 ……………………………………………5
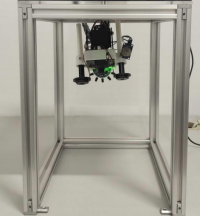
2.2.1总体结构设计 ………………………………………………………5
2.2.2车体结构与行走系统………………………………………………6
2.2.3手爪升降机构………………………………………………………8
2.2.4手爪前伸平移机构… ………………………………………………8
2.2.5手爪夹紧机构………………………………………………………9
2.3识别技术应用分析 ………………………………………………………13
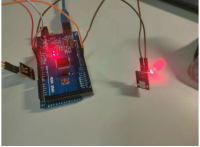
2.3.1 RFID电子标签选用………………………………………………14
2.3.2 RFID阅读器设置与相关操作指令………………………………15
2.3.3 RFID阅读器优化设置……………………………………………20
2.4 搬运机器人控制系统……………………………………………………20
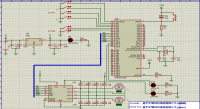
2.4.1 控制系统硬件结构………………………………………………20
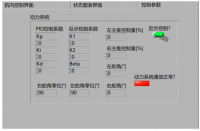
2.4.2 控制系统软件功能分析…………………………………………26
第3章 搬运机器人控制系统软件设计…………………………………………28
3.1 编程语言简介……………………………………………………………28
3.2软硬件调试系统…………………………………………………………28
3.3 单片机控制系统软件设计 ……………………………………………29
3.3.1 主控模块程序流程图……………………………………………29
3.3.2循迹计数处理模块实现方法………………………………………30
第4章 基于RFID识别技术的搬运机器人在技能大赛项中的应用 …………34
4.1赛项概述 ………………………………………………………………34
4.1.1场地介绍……………………………………………………………34
4.1.2任务要求……………………………………………………………36
4.2赛项策略分析 …………………………………………………………36
4.3竞赛应用分析 …………………………………………………………38
结论 ……………………………………………………………………40
参考文献 …………………………………………………………………………41
致 谢 …………………………………………………………………………42
参考文献
1.机械设计课程设计/王洪,邹培海主编-北京大学出版社;北京交通大学出版社,2009,5
2.简明机械设计手册/孔凌嘉主编-北京:北京理工大学出版社,2008,2
3.机械制造工艺与装备-孔英达主编/北京:机械工业出版社,2011,9
4.实用机械制造工艺设计手册/王凡主编-北京:机械工业出版社,2008,5
5.SolidWorks2005入门与实例详解/立雅科技编著-北京:中国铁道出版社,2005,4
6.SolidWorks2009机械设计实例精解/曹岩主编-北京:化学工业出版社,2009,7
7. 电子电路原理分析与仿真/许自图编著-北京:电子工业出版社,2006,10
8. 机械设计基础与实践/吴明清,王真主编-北京:北京大学出版社,2010,9
9. 钱晓忠.光学导引式自动小车系统的研究和应用.江苏大学硕士学位论文,2008,6
10.李成伟,朱秀丽,贠超.码垛机器人机构设计与控制系统研究[J].机电工程.2008(12)
11.林靖,陈辉堂,王月娟,蒋平.机器人视觉伺服系统的研究[J].控制理论与应用.2000(04)
12.韦维. RFID技术及其使用频段分析[J].广西物理. 2006(04)
13.张新荣,霍莹,王金民.基于PLC的生产线运料车控制系统设计[J].制造业自动化.2011(07)
14.李德军,张小栋,王云霞.轮式移动机器人行走的模糊比例积分控制方法[J].西安交通大学学报.2008(01)
15.徐国英,陈平,罗晶.基于图像的机器人视觉伺服系统[J].伺服控制.2007(05)
16.马少华,蔡诗韵,曾娟.基于双目视觉的机器人局部路径规划[J]. 沈阳建筑大学学报(自然科学版).2006(03)
17.张兴国,张磊.开放式5R工业机器人系统设计及分析[J].机械设计与制造. 2011(03)
18.王立权,刘秉昊,吴健荣,韩金华,卢正宇.6R关节型机器人运动学建模[J]. 智能系统学报.2010(02)




