








基于PLC搬运机器人的控制系统研制
摘要:社会的不断发展,使工业自动化的水平越来越高,工业生产中机器人在社会中所占的地位也显得很重要,一种典型的工业机器人被称为搬运机器人,在生活中已经被应用在不同的地方,内容包括化学工程,食品加工程,还有关于包装物流等地方,自动化生产领域物料搬运随着现在社会的需求的不断增加在各个方面也在逐渐增加,本课题对plc搬运机器人的执行行动机构的部位,驱动执行动作机构的部位,检测设备装置的部位,控制系统的部位,繁琐机械的部位主要研究目的。本课题首先通过阐述最基本的需求与总体的设计方案,提出了基于和plc的搬运机器人的技术性能有关指标,性能等内容,对机器人的控制系统进行了详细的设计分析,并对搬运机器人的工作原理,硬件组成及各部分的作用进行分析;其次,根据控制要求,确定了控制系统的大体方案,在原有的机器人方面增加了一些新型的内容,重点研究了搬运机器人plc方面;最后以编程语言为辅,完成搬运机器人控制系统的设计。
关键词:机器人;plc;控制系统; Development of Control system for handling Robot based on plc
Abstract:With the continuous development of society, the level of industrial automation is getting higher and higher, and the position of robot in society in industrial production is also very important. A typical industrial robot is called moving robot. It has been used in different places in life, including chemical engineering, food engineering, packaging logistics and so on. With the increasing demand of the society, the material handling in the field of automatic production is also increasing gradually in all aspects. The part of the executive action mechanism of the plc handling robot and the part of the actuating mechanism of the robot in this subject are also gradually increasing. To detect the location of the device, the position of the control system, and the complexity of the device. The main purpose of the research is to study the position of the tedious machinery. Firstly, by expounding the most basic requirements and the overall design scheme, this paper puts forward the technical performance index and performance of the handling robot based on and plc, and makes a detailed design and analysis of the robot's control system, and makes a detailed design and analysis of the robot's control system. The working principle, hardware composition and the function of each part of the handling robot are analyzed. Secondly, according to the control requirements, the general scheme of the control system is determined, and some new contents are added to the original robot, and the plc aspect of the handling robot is mainly studied. Finally, based on the programming language, the control system of the handling robot is designed
Keyword:Robot; plc; control system
目录
第一章 引言
1.1 课题来源及研究意义-------------------------------------1
1.2 本文主要研究内容---------------------------------------1
第二章 机器人
2.1 机器人的介绍-------------------------------------------2
2.1.1 机器人的技术特点------------------------------------4
2.1.2 机器人的系统组成------------------------------------5
2.1.3 机器人的技术指标------------------------------------5
2.1.4 机器人种类------------------------------------------6
2.2 机器人的发展-------------------------------------------7
第三章 搬运机器人的概括
3.1搬运机器人的产生和发展----------------------------------8
3.2搬运机器人的硬件组成及各部分的作用----------------------9
3.3搬运机器人的控制系统------------------------------------10
3.4搬运机器人的工作原理------------------------------------11
第四章 搬运机器人控制系统的总体设计
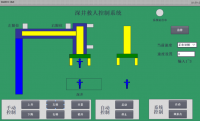
4.1搬运机器人的系统框图------------------------------------11
4.2搬运机器人控制系统整体设计方案--------------------------12
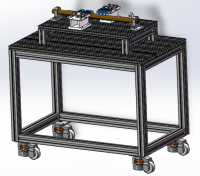
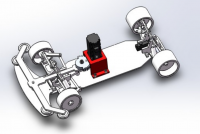
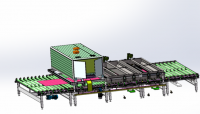
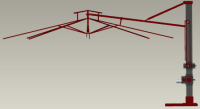
4.3搬运机器人结构设计--------------------------------------12
4.4控制系统硬件结构设计------------------------------------13
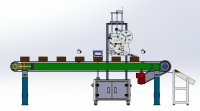
4.4.1搬运机器人的动作过程---------------------------------14
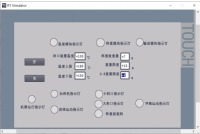
4.4.2搬运机器人的参数设置---------------------------------15
4.4.3接触器的选择-----------------------------------------16
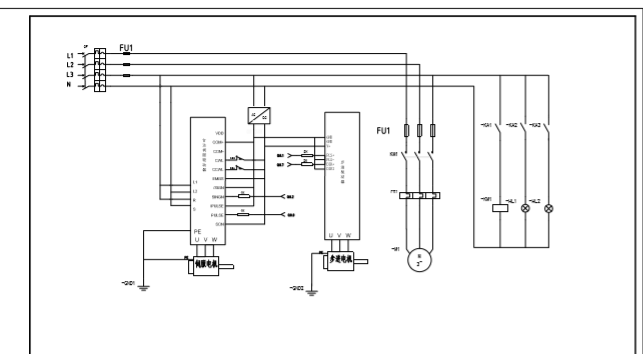
4.4.4搬运机器人的电气原理图-------------------------------17
4.5控制系统软件结构设计-----------------------------------18
4.5.1搬运机器人plc接线图---------------------------------19
4.5.2搬运机器人plc的i/o分配表---------------------------20
4.5.3梯形图-----------------------------------------------21
第五章 总结
5.1总结----------------------------------------------------23
5.2致谢----------------------------------------------------23
5.3参考文献------------------------------------------------24
第一章 引言
1.1课题来源及研究意义
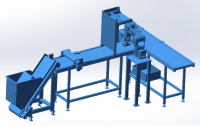
在这个科技飞速发展的21世纪,生产劳动力的选别至关重要,要考虑的问题也有很多,比如生产效率高,比如生产稳定性强等等。但是人力普遍不高,如今市场还面临着人员流动等潜在的大隐患,所以人类劳动力已经满足不了企业发展生产。一开始,老师布置任务课题时,带着思想来到工作中就发现了该企业中有很多相关专业的实习经历,实习过程中发现产线中大多使用自动化设备进行生产,其中以机械手为主,由此想到了以搬运机器人为课题,主要研究plc在搬运机器人控制系统的应用方面的问题,文中研究的内容包含了机器人力学,物理学,自动化技术,传感器技术,plc技术和计算机技术等学科领域方面的技术。是自动化生产流程中的一种新型设备,性能方面的优势和智能化的高低,主要是由机器人神经中枢和大脑的控制系统所来决定的。科技水平的不断提升,机器人已经被广泛的运用于自动生产线中,虽然他们目前还没有人那样灵敏,但是他和人类劳动力比较起来可以明显看出,机械劳动力它具备可以不断重复的工作的能力,不会累不会疼不会感觉到辛苦,不具备惧怕惊险的神经细胞,具有抬起重物的力量比人的力量大的特点,而且机器人不会偷懒,不会抱怨所以也不会出现人员流动这种潜在的影响生产的问题。广泛普及机器人这样即可以为生产公司节省掉许多的人力财力物力等资源,而且采用这些高效的生产劳动力,即可以提高生产效率,也可以加强生产稳固性。所以在后面的生产生活使用中得到了更多的应用,也是在今后工业设备发展的必然方向。
深处这个竞争激烈发展的社会,机器人市场虽多,但是却又普遍存在价格昂贵安全系数低稳定性得不到保证等等问题,这些致命的问题使得世界上大多数的企业,都无法采用这一种高效的劳动力来完全代替人体劳动,本课题设计研究目的主要在于解决或缓解,机器人行业出现的这些问题,使这些高效劳动力普及市场,给企业带来高效的生产。
1.2本文的主要研究内容
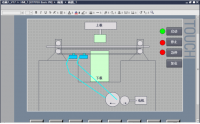
本文通过学习搬运机器人控制系统的工作原理,熟悉了搬运机器人的运动原理,在此基础上确定了搬运机器人的工作原理,动作过程及其编程语言。在动作控制方面,运动学、动力学以及轨迹规划都是和控制方面有关的,在本文中有介绍到与运动控制电路相关的设计,来实现搬运机器人的运动(多轴联动及单轴运动)。本设计实现的是点位控制方面的问题,他的特点是用控制离散点上机器人手爪或工具的位置姿势,但是对相邻两个点的运动轨迹一般不作具体要求。控制电路与计算机之间通过串口来进行联系,连接用户的指令输入并且对数据进行处理,从而完成工作任务或作业。
主要以搬运机器人的设计展开研制,其产生,发展,定义,特点,硬件组成及其工作原理。在机器人大的研制方向,主要以搬运机器人控制系统方向展开,对其动作过程以图形,数据等形式进行分析,plc技术可以在很大程度上更加便利的简化机器人的设计,开发,生产过程,缩短机器人的开发周期;可以更加方便的对机器人的控制系统进行分析,不断预测其性能,提高其性能,更加优化其效率。以编程语言辅助研究搬运机器人的控制系统的设计,可以创建和模拟系统多次需要,可以节省时间,减少风险,错误和复杂性可以增加使用相同元素。
参考文献
[1] 惠梅,赵跃进.精密机械设计[M].北京:机械工业出版社,2009.
[2] 李建华,朱颜.机械设计基础[M].天津:天津大学出版社,2010.
[3] 王岩松,张东民.机械CAD/CAM[M].大连:大连理工大学出版社,2008.
[4] 冯志辉,程一凡,温够萍.机械制图[M].北京:机械工业出版社,2011.
[5] 任彬,黄迪山.机械动力学[M].北京:机械工业出版社,2009.
[6] 丁晓红.机械装备结构设计[M].北京:机械工业出版社,2012.
[7] 李琦,戴文静,苟岩岩.机电一体化技术[M].北京:化学工业出版社,2009.
[8] 宋云艳,周佩秋.工业机器人离线编程与仿真[M].重庆:重庆大学出版社,2010.
[9] 岳维亮.机器人操作与编程[M].上海:上海交通大学出版社,2009.
[10] 何成平,董诗绘.工业机器人操作与编程技术[M].北京:机械工业出版社,2010.
[11] 王茂森,戴劲松,祁艳飞.智能机器人技术[M].上海:上海交通大学出版社,2009.
[12] 黄灿英,陈艳,许仙明.电气控制与PLC控制应用[M].北京:人民邮电出版社,2012.
[13] 杨乐,郭选明,赵淑娟.PLC控制系统[M].北京:机械工业出版社,2008.
[14] 马正强,廖成.电气与PLC控制技术[M].北京:人民邮电出版社,2011.
[15] 郑传琴,韩文虹.PLC控制及应用[M].北京:人民邮电出版社,2008.
[16] 赵伟.PLC控制系统设计安装与调试[M].北京:人民邮电出版社,2002.



