








使用 Visual one设计机器人工位系统设计
摘要:在科技飞速发展的当今社会,机器人已经在工业领域普及,制造业对其的运用已经越来越成熟。它不仅能替代人类
做高危性工作,也可以在很大程度上更合理的运用人力资源。在智能制造领域,机器人至关重要。它肩负着自动化上下料、
焊接、冲压、喷漆、搬运等工作,与智能制造产业链中的其他设备相配合,以此来满足高难度的生产工艺要求的使命。工
业机器人具有可编程、智能化、自动化的特点。机器人的分类与机构特征更是五花八门。根据实际需要的不同,机器人的
机构特征随之变动。机器人根据分类方式的不同,所属类别也不同。按臂部运动方式来分类可以分为直角坐标型、圆柱坐
标型、球坐标型以及关节型。按控制机能来分类又可以分为点位型和连续轨迹型。按程序输入方式来分类又可以分为编程
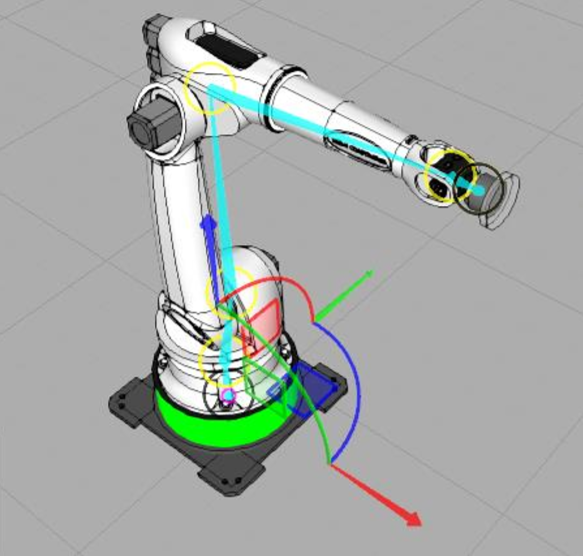
输入型和示教输入型两类。本篇论文所使用的机器人是关节型机器人,主要是使用 Visual one软件对工业机器人的工位进
行设计、仿真,通过设计过程以及仿真动画使我们对工位有更深层次的了解。
关键词:Visual one 软件;工业机器人;技术等级;
Design of industrial robot workstation using Visual one software
Abstract: With the rapid development of science and technology about today’s society, robots have been popularized in the industrial field, and the application of manufacturing industry has become more and more mature. It can not only replace human beings to do high-risk work, but also make more rational use of human resources to a large extent. Robot is very important in the field of intelligent manufacturing. It undertakes the tasks of automatic loading and unloading, welding, stamping, painting and handling, and cooperates with other equipment in the intelligent manufacturing industry chain to meet the difficult production process requirements. Industrial robots are programmable, intelligent and automated. The classification and mechanism characteristics of robots are various. According to the actual needs, the mechanism characteristics of the robot change accordingly. Robots belong to different categories according to different classification methods. According to the movement mode of arm, it can be classified into rectangular coordinate type, cylindrical coordinate type, spherical coordinate type and joint type. According to the control function, it can be divided into point position type and continuous trajectory type. According to the way of program input, it can be divided into two types: programming input type and teaching input type. The robot used in this paper is a joint robot. It mainly uses Visual one software to design and simulate the industrial robot's position. Through the design process and simulation animation, we can have a deeper understanding of the position. Key words: Vision one software; industrial robot; positioning machine;
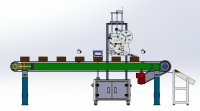
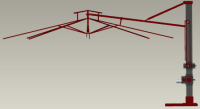
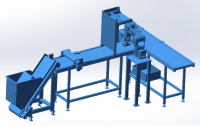
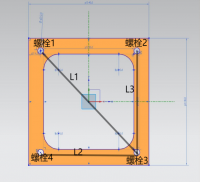
目 录 一、序 论 .................................................................................................................................................. 1 1.1 认识 Visual one ................................................................................................................ 1 1.2 仿真设计 ............................................................................................................................. 3 1.3 课题的内容 ......................................................................................................................... 4 1.4 课题设计的意义 ................................................................................................................. 4 二、设计工位所需的部件 ...................................................................................................................... 5 2.2 变位机的结构选择 ............................................................................................................. 5 2.3 工业机器人的选择、结构 ................................................................................................. 6 2.4 传送带的选择及原理 ......................................................................................................... 6 2.5 堆垛机及立体料架的选择和原理 ..................................................................................... 7 三、设计部件的建模 .............................................................................................................................. 8 3.1 工件的建模 ......................................................................................................................... 8 3.2 关节机器人的建模 ............................................................................................................. 8 3.3 变位机的建模 ..................................................................................................................... 8 3.4 加工中心的建模 ................................................................................................................. 9 3.5 数字化模型的摆放 ............................................................................................................. 9
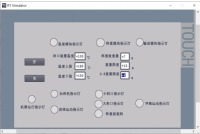
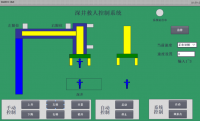
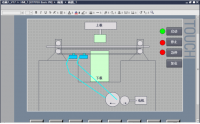
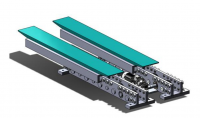
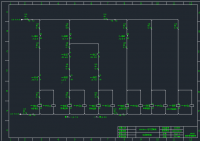
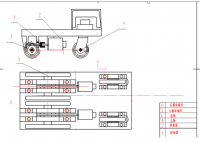
..................................................................................................................................................... 9 四、使用 Visual one 软件实现仿真 .............................................................................................. 10 4.1 关节机器人的工位设计 ................................................................................................... 10 4.3 变位机工位的设计 ........................................................................................................... 15 4.3 任务管理器与机器人程序 ............................................................................................... 21 4.3.1 任务管理器(Works Process v3)的分配 ........................................................... 21 4.3.2 任务管理器(Works Process v3)的作用 ........................................................... 22 4.3.3 任务管理器程序与机器人程序的嵌套 ................................................................... 22 4.3.4 任务管理器(Works Process v3)的程序设置 ................................................... 23 4.3.5 机器人的程序设置 ................................................................................................... 24 4.4 整体仿真 ........................................................................................................................... 25 五、总结及感谢 ..................................................................................................................................... 26 5.1 总结 ................................................................................................................................... 26 5.2 感谢 ................................................................................................................................... 27
参考文献
[1]扬杰钟,王振华,朱利平 工业机器人技术基础.[M].北京:电子工业出版社,2017
[2]徐文福,陈万米.变位机在机器人焊接工作站中的应用[D],2014
[3]朱国华.中国工业机器人产业化发展战略,学术期刊,航天制造技术,2010
[4]周进,贺兴东.我国工业机器人的现状与发展.[A].机器人技术与应用,2013
[5]刘伟,林庆平.机器人仿真及其自动化研究进展.[A].制造业自动化,2011
[6]李惠,马正先,冯波.工业机器人及零部件结构设计.[D],2008
[7]张明文.工业机器人技术专业"十三五"规划教材:工业机器人技术人才培养方案,2012
[8]李开复.王咏刚.人工智能[M].北京:清华大学出版社,2006
[9]李迅雷.梁乃明.我国工业机器人发展现状浅析[A].学术期刊,2016
[10]胡盛斌.关节式工业机器人仿真及上位机控制软件研究.[D].哈尔滨工业大学,2009
[11]郭琼.先进制造技术.[M].陕西:西安电子科技大学出版社,2013
[12]丁国富,王金诺.基于虚拟现实的机器人三维运动仿真技术研究.[M].上海:上海大学,



