





















管道清淤机器人的总体结构及控制系统的设计
摘 要
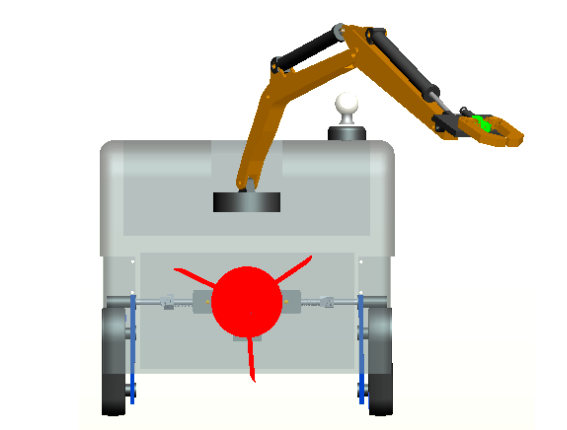
城市下水管道的检修和清理作业一直是困挠城市居民日常生活和工业生产的难题。常规作业很难适应其要求,国内下水管道的清淤工作还保持在人工作业的阶段,工作环境恶劣,工作效率低,危险性大,因此,设计一种能够代替人工操作的管道清淤机器人意义重大。本文提出了一种无缆式双履带可变径式下水管道清淤机器人,应用于城市下水管道的疏通与检测工作。
首先提出了双履带可变径式城市下水管道清淤机器人总体设计方案,对清淤机器人的系统组成和工作原理进行了相关说明,其次对机器人在方形管道和圆形管道中行走关键技术展开了研究,包括行走的牵引力、附着力,变径结构的实现,越障能力的分析等;另外对管道机器人清淤系统驱动方案、清淤机械手和绞刀机构的配合工作方式以及淤泥处理方案展开了设计,对机器人工作状态的倾覆问题进行了相关描述,最后采用控制芯片ATMEGA16L对管道清淤机器人的控制模块进行了相关研究和设计。
城市下水管道清淤机器人可在城市下水管道中自主行走、携带机器视觉设备和清淤设备完成对管道的清淤工作,对城市下水管道的清理工作提供了一种新的可行方案。
关键词:管道清淤;可变径式;无缆式;双履带式
Abstract
The repair and cleaning of the city's sewage pipes has been a difficult problem for people in urban areas to struggle with daily life and industrial production. Routine, it is difficult to adapt to the requirements, the domestic dredging work remains in the manual operation stage, with bad working environment, low working efficiency and high risk. Therefore, to design a pipeline which can replace manual operation is of great significance. In this paper, a kind of non-cable double crawler dredging robot with variable diameter type water pipe is proposed, which is used in the drainage and testing of urban water pipes.
Firstly, the overall design programmers of the double crawler type variable diameter city sewer dredging robot was proposed, the system composition and working principle of dredging robot was introduced. Secondly, the key technology of the robot walking in the square tube and round pipe was researched on. Included the walking traction, adhesion, the realization of the tapered structure, and the analysis of the obstacle negotiation ability, etc.
In addition, the dredging system's drive scheme of the pipeline robot, the coordination type of dredging manipulator and the reamer institutions, the sludge treatment scheme were all designed. The overthrow status of the robot problem was described. Finally, the related control module of the pipes dredging robot was researched and designed , adopting the control chip ATMEGA16L.
The city water pipe dredging robot can walk in urban water pipelines independently, carrying machine vision equipment and dredging equipment for pipeline dredging work, to provide a new feasible solution for city water pipe cleaning work.
Keywords: Pipeline dredging; Double caterpillar; Variable diameter ;No cable
目 录
1 绪论 1
1.1 课题研究背景 1
1.2 本课题的研究意义 2
1.3 国内外管道清淤机器人的发展状况 2
1.3.1 国外管道机器人的发展概况 3
1.3.2 国内管道机器人的发展状况 4
1.4 本课题的主要研究内容 6
1.5 本章小结 6
2 管道清淤机器人的总体结构设计 7
2.1 管道清淤机器人工作原理 7
2.1.1管道清淤机器人系统指标 7
2.1.2管道清淤机器人系统组成 8
2.2 管道清淤机器人本体结构设计 8
2.3 管道机器人行走机构的驱动方式 9
2.4 行走机构设计 10
2.4.1 移动方式的选择 10
2.4.2 管道机器人主传动系统的设计 10
2.4.3 管道机器人零件材料的选择 11
2.5 变径结构的设计 12
2.6 视觉系统的设计 13
2.7 管道清淤机器人的其它附属装置 14
2.8 本章小结 14
3 管道清淤机器人行走机构关键技术研究 15
3.1 方形管道内机器人行走条件的研究 15
3.1.1 地面单位压力 15
3.3.2 牵引力和附着力 16
3.2 圆形管道内机器人行走条件的研究 18
3.3 清淤机器人转向运动学分析 19
3.4 清淤机器人行走机构越障能力分析 21
3.4.1加速阻力 22
3.4.2爬坡阻力 22
3.4.3滚动摩擦力矩 22
3.4.4越障高度分析 22
3.5 本章小结 24
4 管道机器人清淤系统关键技术研究 25
4.1清淤动力提供方案设计 25
4.2 清淤系统的组成 26
4.2.1清淤机械手的设计 26
4.2.2 绞刀系统的设计 26
4.3淤泥处理方案设计 27
4.4 本章小结 27
5 机器人清淤工作状态倾覆问题的研究 28
5.1 清淤机械臂在机器人本体前方工作 28
5.2 清淤机械臂在机器人本体后方工作 29
5.3 清淤机械臂在机器人本体侧方工作 30
5.4 本章小结 31
6 管道清淤机器人控制系统研究 32
6.1清淤机器人控制系统方案设计 32
6.2 下位机——ATMEGA8驱动电路设计 33
6.3 485通信模块设计 33
6.4上位机——手持控制器的设计 34
6.4.1手持控制器的硬件设计 34
6.4.2手持控制器的软件设计 34
6.6 本章小结 35
7 总结与展望 36
7.1 总结 36
7.2 展望 37
参考文献 38
参考文献
[1] 王恒志. 轮式排水管道检测机器人的运动性能研究[D]. 黑龙江:哈尔滨工业大学,2013.
[2] 陈松 李天剑 王会香 刘相权. 排水管道机器人综述[J]. Robot Technique and Application.2014,01:23-27.
[3] 许冯平,周 延,赵志聪. 蠕动式排水管道机器人研制[J]. 机械设计与制造2014,10(10):190-193.
[4] 马利平. 牵引式排水管道清淤机器人的研究[D]. 唐山:河北联合大学.2015.
[5] RYMANSAIB Z,IRAVANIP,SAHINKAYA M N.Exponential Trajectory Generation for Point to Point Motions[C]/ /Advanced Intelligent Mechatronics ( AIM) ,2013 IEEE / ASME International Conference on.IEEE,2013:906-911.
[6] KOICHI SUZUMORI. Elastic materials producing compliant robots[J]. Robotics and Autonomous Systems,2006(7):135-140.
[7] H.MARTIKKA,A.MIKKOLA. Dynamics Simulation and Design of a Hydraulic Driven Boom Using ADAMS[C]. 1995 International ADAMS User Conference. Radisson on the Lake Resort & Conference Center Ypsilant,1995:274-281.
[8] 徐从启 . 自主锁止蠕动式微小管道机器人关键技术研究[D]. 湖南:国防科技大学,2010.
[9] 姜红娟.城市主排水管道穿缆检测机器人结构及其运动特性的研究[D].黑龙江:哈尔滨工程大学,2006.
[10] 祛鹏程,沈惠平等.城市下水管道缆控清淤机器人的研究[J].伺服控制,2010.08
[11] 王丰等.城市排水管道缆控清淤机器人的研究[J].伺服控制,2008(4) : 161-163.
[12] 李洁.基于全气动逻辑控制的管道清淤机器人研究与实现[D]. 北京:北京交通大学,2017.
[13] 李华飞.大管径排水管道水力清淤技术研究[J]. 重庆:重庆大学,2012.
[14] 徐小云等. 管道机器人适应不同管径的三种调节机构的比较[J]. 光学精密工程,2004,12(1):60-65.
[15] 陈应松,周瑜. 基于视觉的机器人在管道检测中的远程控制研究[J]. 制冷与空调. 2010,24(4).
[16] 武燕等. 可变径管道机器人系统的设计与研究[J]. 矿山机械. 2013,41(4).
[17] 吴贞桢. 管道清淤机器人的研制及其清淤泵送特性研究[D].北京:北京交通大学,2016,
[18] 李博. 排水管道淤积物特性分析及清淤装置设计研究[D]. 北京:北京建筑大学. 2011.
[19] 李成群,么鸿鹏,张净霞. 自主式管道清淤机器人的研究[J]. 机床与液压.2015,43(15).
[20] 么鸿鹏. 自主式排水管道清淤机器人的研究[D]. 唐山:河北联合大学.2015.
[21] 贾守波. 城市排水管道机器人工程样机的研究[D] 黑龙江:哈尔滨工程大学. 2008.
[22] 李晓贞,王福志,王忠举等. 基于单片机的步进电机调速研究[J].农业装备与车辆工程.2008(8):22-24.



