






夹持型机械手的建模与运动仿真分析
摘要:课题为夹持型机械手的建模与运动仿真分析。以机械手为研究对象,对零件的结构进行分析,确定
机构的大小,分析机构是如何运动的。在 NX 上对机械手进行三维建模、装配和仿真分析。动画可以显示机
构的运动形式,图表可以让我们更深入了解机构,可以了解机构的速度和位移。以此来考察学生对机械手
的理解和对 NX 软件的应用。
关键词:机械手;建模;装配;运动仿真
Modeling and Kinematic Simulation Analysis of A Clamping Manipulator
Abstract: The topic is modeling and motion simulation analysis of clamping manipulator. Taking the manipulator as the research object, Analysis of the structure of the parts, Determine the size of the mechanism, How is the analytical organization moving. 3D modeling , assembly and simulation analysis of manipulator are carried out on NX. Animation can show the form of motion of the organization, The chart gives us a deeper understanding of the organization, It is possible to understand the speed and displacement of the mechanism. In order to investigate students' understanding of manipulator and the application of NX software.
Key words: manipulator; modeling; assembly; motion simulation
一、选题简介、意义
毕业设计是大学生涯最后的一个学习环节,也是迈向社会的第一步,是对我们三年学习的一个总结。
选择毕业设计课题是关于“机械手”主要是和机械有关,结合实际知识,绘制二维图,在NX中进行机构的建模、装配,在运动仿真模块中进行运动仿真分析。通过自己的设计,绘制二维图、建模、装配和运动仿真分析。从而巩固自己的理论知识,使自己初步掌握设计的基本方法与思路,同时具备相应的工作能力,使以后的工作学习中可以尽快适应生产第一线的工作方法与步骤,也使得我们更好地表现出我们知识水平。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
1、课题研究:
夹持型机械手的建模与运动仿真分析
2、主要研究的内容:
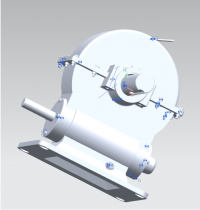
课题主要内容是对夹持型机械手进行分析,确定机构的样式,进行二维图的绘制,在NX中进行建模、装配和运动仿真分析,并完成说明书。
3、要解决的问题
1)进行二维图的绘制
2)NX中进行建模、装配
3)运动仿真分析
4)说明书
4、预期目标
按照规定完成毕业设计,尽自己最大的努力做到更好,给自己的大学生活画上一个完美的句号。
5、研究步骤、方法及措施
1)根据机构原图,分析结构,绘制二维图
2)根据设计好的尺寸,在NX中进行机构的建模与装配
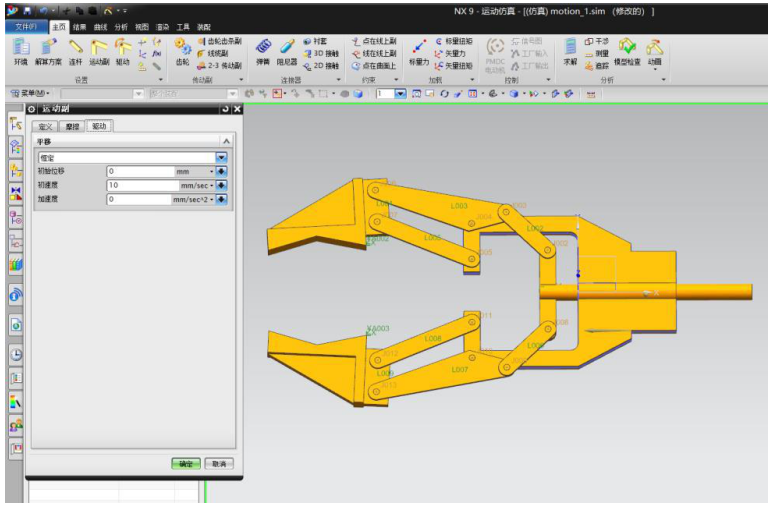
3)在NX运动仿真模块中对装配好的机构进行运动仿真分析
4)整理说明书、小结
三、设计(论文)体系、结构(大纲)
开始→绘制二维图→建模→装配→运动仿真分析→编写说明书
大纲:
第一章
1.1 研究意义
1.2 研究内容
第二章 机构的理论分析与建模装配
2.1 机构的理论分析
2.2 机构的三维建模
2.2.1 底板的建模
2.2.2 推动杆的建模
2.3 机构的装配
2.3.1 底板的装配
2.3.2 推动杆的装配
2.3.3 连接杆3的装配
第三章 机构的运动仿真
3.1 定义连杆
3.2 定义运动副
3.2.1 为推动杆添加运动副
3.2.2 为连接杆3添加运动副
3.2.3 为连接杆2定义运动副
3.3 定义驱动
3.4 定义求解方案和计算
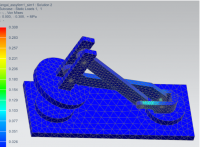
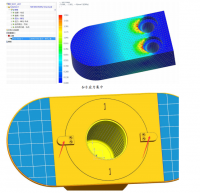
第四章 仿真结果分析
4.1 检查设计
4.2 仿真分析
第五章 总结
致谢
参考文献
参考文献
[1]孙桓、陈作模、葛文杰.《机械原理(第七版)》.北京:高等教育出版社,2006.5
[2]张晋西、张甲瑞、郭学琴.《UG NX/Motion 机构运动仿真基础及实例》.北京:清华大学
出版社,2009.4
[3]孙燕华.《AutoCAD 机械制图(第二版)》.北京:机械工业出版社,2014.8
[4]洪如瑾.《NX 7 CAD 快速入门指导》.北京:清华大学出版社,2011.6
[5]华红芳、孙燕华.《机械制图与零部件测绘(第二版)》.北京:电子工业出版社,2015.5



