
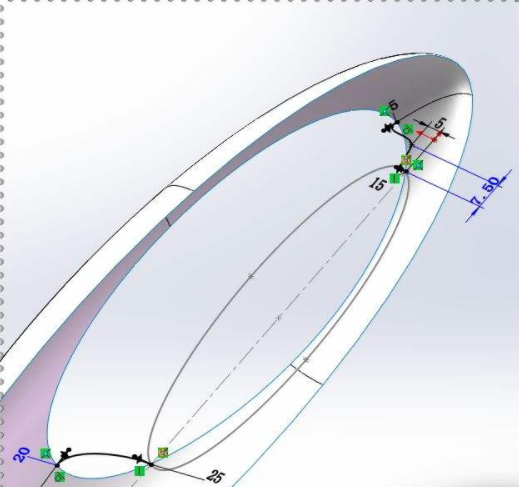






椭圆仪机构的建模以及运动仿真分析
摘要:课题为椭圆仪机构的建模及运动仿真分析,以椭圆仪为研究对象,对零件的机构原理图进行分析,确定机构的工作原理,并借用UG软件进行建模、装配及运动仿真分析,借此展示了使用UG NX软件对运动机构进行运动仿真分析的方法及步骤,并将机构的运动过程和分析结果用动画和图表表示出来,得到运动过程中的精确数据,为机构的优化设计提供参考。
关键词:连杆;UG;运动仿真
Ellipse instrument work modeling and motion simulation
Abstract: The topic is the modeling and motion simulation of the lifting platform mechanism. Taking the lifting platform as the research object, the principle diagram of the mechanism of the part is analyzed, the working principle of the mechanism is determined, assembling and motion simulation analysis. This shows the method and steps of using UGNX software to simulate the motion of the motion mechanism, and expresses the motion process and analysis results of the mechanism in animations and charts to obtain accurate data during the motion process. It provides reference for the optimal design of the mechanism.
Keywords: connecting rod/bar; UG; Motion simulation.
目录
第一章 绪论 2
1.1椭圆仪研究的背景 2
1.1.1椭圆仪简介 2
1.1.2椭圆仪的现状分析 2
1.2本次设计的内容 3
1.3本次课题研究的意义及目的 4
第二章 椭圆仪的原理分析和结构设计 5
2.1椭圆仪的理论分析 5
2.2本次椭圆机设计的方案 5
2.3十字导轨底盘的设计 6
2.4连杆的设计 6
第三章 椭圆仪的三维建模与装配 7
3.1十字导轨底盘的建模 7
3.1.2滑块的建模 7
3.1.3连杆的建模 8
3.1.4主动连杆的建模 9
3.2椭圆仪机构的装配 10
3.2.1新建装配 10
3.2.2底盘的装配 11
第四章 椭圆仪的运动仿真 15
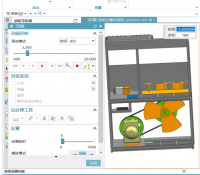
4.1NX创建仿真 15
4.2对连杆的定义 15
4.3对运动副进行定义 16
4.3.1主动连杆定义为旋转副 17
4.3.2 长连杆定义为旋转副 17
4.3.3两个孔定义为旋转副 18
4.3.4 两个滑块定义为滑动副 19
4.4对驱动进行的定义 21
4.5定义的结算和求解方案 21
第五章 椭圆仪机构的运动仿真分析 25
5.1椭圆仪机构的轨迹的显示 25
5.1.1新建标记的点 25
5.1.2新建追踪路径 26
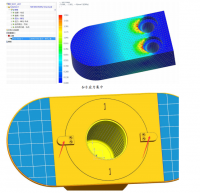
5.2长连杆的圆弧圆心位移、速度和加速度 27
5.2.1长连杆的圆弧圆心的速度 28
5.2.2长连杆的圆弧圆心的加速度 28
5.3长连杆孔的分析 29
5.3.1长连杆的孔的位移 29
5.3.2长连杆中心孔的运动速度分析 30
5.3.3长连杆中心孔的加速度分析 31
5.3.4 A001与A005的分析比较 32
总结 33
致谢 34
参考文献 35



