






一种输送带用机械手的机构设计与造型
摘要
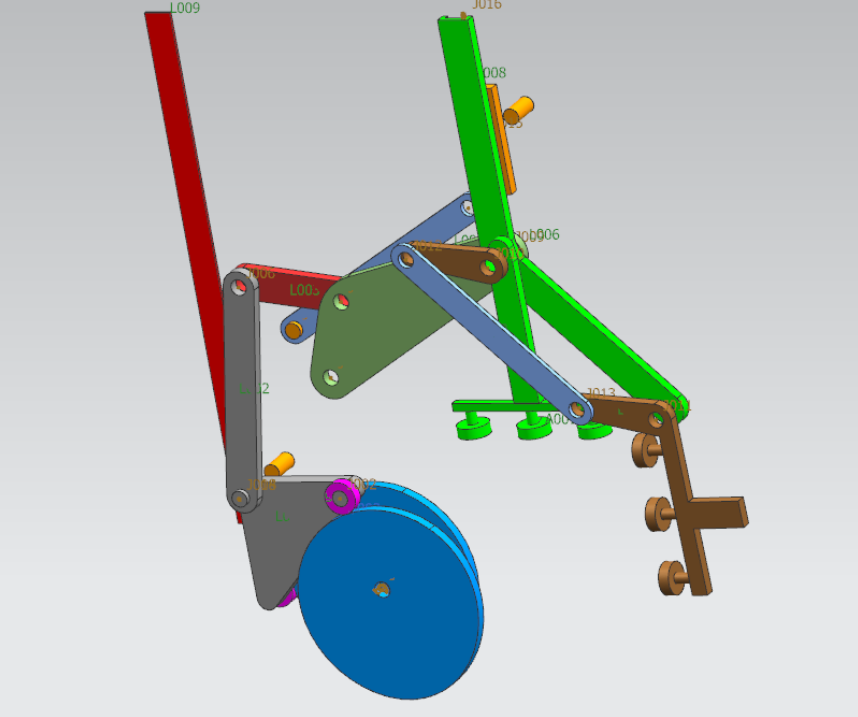
我国是一个人口大国,在流水线生产线上机械手能够代替人们进行长时间反复而又枯燥的工作。本次设计主要内容是一种输送带用机械手的设计与造型,通过电机对其进行驱动,确定电机的型号,设计主要运动机构为凸轮机构,通过对执行机构的运动需求来设计本机构的凸轮曲线轮廓,并对其机构进行自由度的计算,双摇杆机构与滑块机构配合使用,实现对物料从存储仓搬运到输送带上,之后通过NX软件来实现各个零件的三维造型和装配,最后通过对整体机构进行运动仿真,确定杆件之间的干涉与运动规律符合工作需求,为实际机械手中的设计提供了参考。
关键词:凸轮机构;双摇杆机构;滑块机构;三维造型;运动仿真
Abstract
Our country is a big country of population, in the assembly line production line, the manipulator can replace people for a long time repeated and boring work. The main content of this design is the design and shape of a conveyor belt manipulator. It is driven by a motor to determine the model of the motor. The main design mechanism is the cam mechanism. The cam profile of the mechanism is designed by the motion demand of the actuator, and the freedom of the mechanism is calculated. The double joystick mechanism is used in conjunction with the slider mechanism to achieve the material transfer from the storage warehouse to the conveyor belt. After that, the 3D modeling and assembly of each part are realized through the NX software. Finally, the motion simulation of the overall mechanism is carried out to determine that the interference between the rods meets the work requirements and provides a reference for the design of the actual mechanic.
Key words: Cam mechanism; Double joystick mechanism; Sliding mechanism; Three-dimensional modeling; Motion simulation
第一章 序言
1.1研究背景和意义
先如今的科技越来越发达,许多人力都可以用机械替代,譬如机械手的发明,经过长时间的发展,技术变得越来越成熟,机械手也完善起来了,在先今的社会中有着重大的作用。机械手广泛的应用于流水生产线上,能代替人类进行长时间枯燥而又乏味的工作,因为机械手是机器,不会像人一样容易产生疲乏,机械的自动化生产可以很大的提高一个工厂的效率,避免一些因为人为的发生错误,从而导致生产效率的影响。并且由于机械手的自动化工作,工厂可以减少对工人培训所产生的时间与费用,能够把更多的资金投入到企业生产中。运用机械手可以降低人工的劳动强度,降低工人的受伤概率。对工件的整体造型也能更加的改观,提高工件的质量,维修起来方便,发生故障,只需调整机器或者更换机械手,不会影响工厂的正常运转过程。越来越多的自动化机械的运用,便利企业的运用,提高了企业的发展。机械手的优缺点:运动可靠,工作效率高,成本低,但是一旦固定好后就不能轻易地调整了。机械手通常做用于自动机床或自动生产线上。
目录
目录 1
摘要 I
Abstract II
第一章 序言 1
1.1研究背景和意义 1
1.2研究现状 1
1.2.1国内研究现状 1
1.2.2国外研究现状 2
1.3课题研究主要研究内容 2
1.4本章小结 2
第二章 方案设计 3
2.1基本方案的提出 3
2.2机构设计与工作原理 4
2.2.1凸轮机构的设计 4
2.2.2 双摇杆机构的设计 5
2.2.3滑块机构的设计 6
2.3本章小结 6
第三章 输送带用机械手的三维造型 7
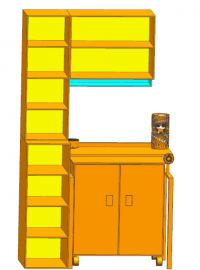
3.1目标位置架的建模 7
3.2滚子架的建模 10
3.3滚子的建模 12
3.4固连杆的建模 13
3.5连动杆的建模 13
3.6摇杆的建模 14
3.7伪驱动杆的建模 15
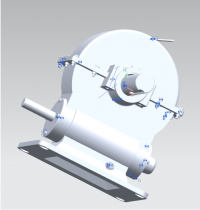
3.8支架的建模 16
3.9滑动导向架的建模 22
3.10平行连杆的建模 23
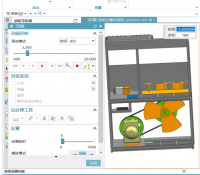
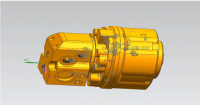
3.11驱动凸轮的建模 25
3.12本章小结 27
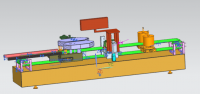
第四章 输送带用机械手的装配 28
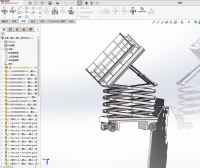
4.1输送带用机械手的装配 28
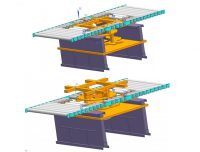
4.2输送带用机械手的爆炸图 35
4.3本章小结 37
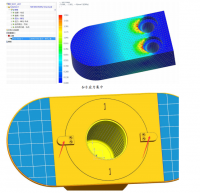
第五章 输送带用机械手的仿真 38
5.1输送带用机械手的装配仿真 38
5.2运动仿真 40
5.3本章小结 44
第六章 结论与展望 45
致谢 46
参 考 文 献 47
参 考 文 献
[1]张建民,工业机器人,北京,北京理工大学出版社.1992
[2]史国生,机械手步进控制中的应用,中国工程信息网.2005.1
[3]刘明保,吕春红等,机械手的组成机构及技术指标的确定,河南高等专科学校学报.2004.1.1
[4]李允文,工业机械手设计,机械工业出版社.1996.4
[5]陆祥生,杨绣莲,机械手,中国铁道出版社.1985.1
[6]陈立德,罗卫平,机械设计基础[M],北京,高等教育出版社.2015
[7]王建军,搬运机械手仿真设计和制作[J],机械设计与制造,2012,09:146-148
[8]蔡自兴,机器人学[M],北京,清华大学出版社,2000.
[9]付铁,李金泉,陈恳,等,一种新型高速码垛机械手的设计与实现[J],北京理工大学学报,2007,27(1):17-18
[10]马纲,王之栋,韩松元.一种新型码垛搬运机械手的设计[J],实验室研究与探索,2017(4):64-65
[11]陈建明. 自动控制理论[M].哈尔滨:电子工业出版社,2009.



