






基于RobotStudio的手机贴膜装箱机器人编程方案设计
摘 要
目前,手机已经成为了人们随身携带的物品,随着手机屏幕尺寸越做越大,为保护手机屏幕人们贴膜的需求也在增加,手机贴膜基本采用人工劳作的,并不能长时间工作,而且会有一定的破损率并精度不高效率也不高,如果采用了机器人来进行全自动化贴膜,效率高、精度高、而且不易损坏,这样可以减轻企业在人力、物力、财力方面的损耗,我本次所做的毕业设计目的是为以后做手机的企业实现全自动化贴膜生产装配从而为增加产量、节省成本做准备。我运用了UG建模创建了一个手机模型并且采用了RobotStudio虚拟仿真软件进行了本次自动化手机贴膜仿真模拟实验并编写了程序来证明本次毕业设计的可行性。
关键词:UG建模 手机贴膜 RobotStudio虚拟仿真软件
目 录
摘 要 I
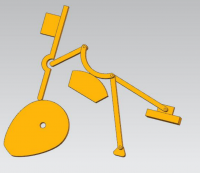
1、IR B120工业机器人的结构与参数 1
1.1 IR B120机器人的结构 1
1.2 IR B120机器人的参数 2
2、 手机、膜、盒子、工作台的三维建模设计 6
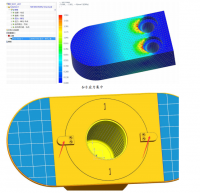
2.1 手机的建模设计过程 6
2.2 手机膜的建模设计过程 7
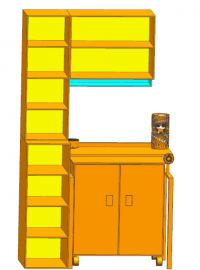
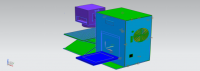
2.3 手机盒的建模设计过程 8
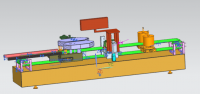
2.4 工作台的建模设计过程 10
3、IR B120手机贴膜装箱机器人工作过程虚拟仿真 12
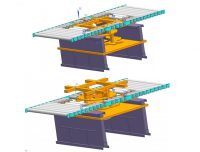
3.1 RobotStudio工作站建模 12
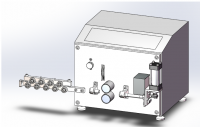
3.2 ABB IRB 120机器人的仿真过程(工作过程) 13
3.3 ABB IRB 120机器人的组件连接图 20
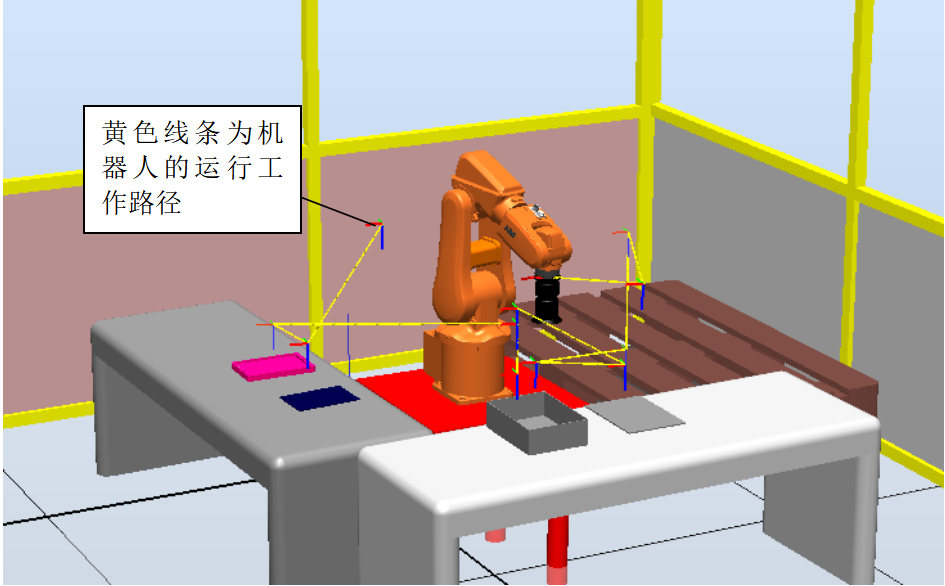
3.4 IR B120机器人工作站轨迹图 21
3.5查看程序 22
总 结 24
致 谢 25
参考文献 26
参考文献
[1] 刘小波.工业机器人技术基础[M],北京:机械工业出版社,2016.
[2] 彭广威.UG NX 10.0机械三维设计项目教程[M].北京:航空工业出版社,2018.
[3] 叶晖.工业机器人工程应用虚拟仿真教程[M].北京:机械工业出版社,2017.
[4] 宋云艳.工业机器人离线编程与仿真[M].北京:机械工业出版社,2017.
[5] 叶晖.工业机器人典型应用案例精析[M],北京:机械工业出版社,2017.
[6] 陈小艳,林燕文.工业机器人现场编程(KUKA)[M].北京:高等教育出版社,2017.
[7] 张富建.职业学校毕业设计指导与实例[M],北京:清华大学出版社,2010.



