





















采棉机械手结构设计(说明书+CAD+三维建模)
摘要
棉花生产己经成为新疆农业中得支柱产业,近年来,由于劳动力短缺,劳动力价格不断提高,使用采棉机进行棉花的采收符合新疆棉花生产的现状。滚筒式采棉机是一种统收式的采棉机,在采摘头摘锭结构设计上较为新颖。在农业机械的研究过程中,试验台是一种应用广泛的试验设备。采用试验台对滚筒式采棉机进行研究,有效的避免了田间不确定因素对采摘头试验结的影响,有利于对采摘头的采摘效进行定量研究。采摘头是采棉机的关键部件,本文基于采摘试验台,通过试验方法对采棉机采摘头的采收性能进行研允,通过对数据的处理分析采摘头参数对采摘性能的影响规律,完成对采摘头土;作参数的优化。通过对棉花采摘机械手的采摘环境和采摘特点进行分析,提出一种六自由度小型棉花采摘串联机械手。通过设计3种末端执行器机械结构,使得机械手具有多用途作用,并将机械手与相关辅助装置相结合,实现整个棉花园采摘过程的自动化。本论文基于SolidWorks,建立机构的三维模型与仿真分析。根据仿真与试验的结得出机械手具有良好的采摘性能。该机构解决了人们采摘高处棉花难、棉花采摘工作量大和人工采摘具有一定危险性等缺点,实现了小型棉花等多种棉花不受物理损伤的自动化采摘。
关键词:工业机器人;棉花采摘机器人;机械手;solidworks建模;
目录
第1章 绪论 14
1.1 课题研究背景及意义 14
1.2 国内外研究成及现状 16
1.2.1 国外采摘机器人成及现状 16
1.2.2 国内研究成及现状 17
第2章 棉花采摘机器人机械手机构设计 19
2.1 采摘机器人选型原则 19
2.2 棉花采摘机器人机械手的选型 20
2.3 本章小结 20
第3章 棉花采摘机器人总体结构方案设计 21
3.1 可移动小车底盘 22
3.2 升降梯 22
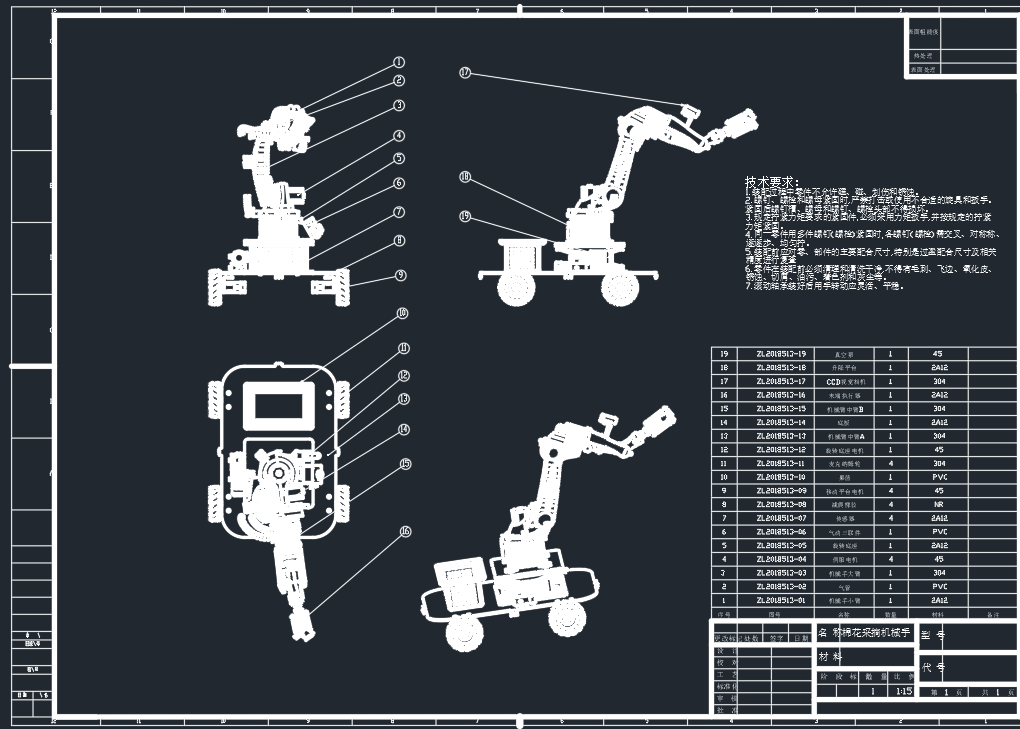
3.3 棉花采摘机械手臂 23
3.4 采棉机械手的设计方案 24
3.5 电控系统 24
3.5.1 控制系统 24
3.5.2 视觉系统 24
3.6 本章小结 25
第4章 采棉机械手的设计 26
4.1 采棉机械手设计的总体原则 26
4.2 设计三维软件Solidworks简介 26
4.3 连杆机构设计方案 26
4.4 半球式设计方案 33
4.5 半齿设计方案 34
4.5.1 齿轮传动的计算载荷 35
4.6 三种方案的优缺点分析 38
4.7本章小结 39
总结 40
参考文献 41
第1章 绪论
1.1 课题研究背景及意义
新疆是我国最大的优质棉种植区。新疆地区棉花的单产、总产、国内销售量以及出口量连续多年在全国位居首位。棉花生产己经成为了新疆农业中的支柱性产业。新疆有实现棉花全程机械化的优越条件即人均种植而积大,拥有大而积高产连片一棉田和国家及政府相关政策及经济支持等。日前新疆棉花采收己基本达到机械化水平,但是新疆棉花的采收仍然以手工采收为主,近年来,随着从内地组织劳力采棉难度加大,同时劳动力价格的不断上涨新疆各棉花生产区都存在着不同程度的人力不足现象,棉花不能及时采摘。棉花采收已经成为了新疆棉花产业发展中巫待突破的“瓶颈”。采棉机的应用推广成为了新疆棉花生产的必然趋势。实施和推广机械采棉技术,能够把广大农止从繁重的体力劳动中解放出来,分流转移到二、三产业中去,对于农业增效、农民增收、切实解决“三农一问题,对建设社会主义新农村具有重要现实意义。采棉机采摘头根据工作原理及采收特点,可以分成选收机(摘锭有选择的采收)和统收机(摘锭无选择性的采收)2类。其中选收机中,具有代表性的是垂直摘锭采棉机(spindle harvester )和水平摘锭采棉机。统收机主要有滚筒结构(brush-roll stripper)和指杆结构(timerstripper )采棉机。选收式采棉机具有采净率高、含杂率低、机器适应性好等优点,但是该类机型的结构复杂,加工制造困难,制造成本高,收获成本大,这些问题限制了其大规模的推广。统收采棉机的结构相对简单,采收效率和采净率较高,收获成本较低。
目前使用的采棉机主要是以水平摘锭采棉机为主的选收机,这种采棉机虽然工作可靠、性能稳定,但由于结构复杂,关键部件未能国产化,致使购机成本高、零配件价格高、维修费用高、服务不及时等因素的影响,农民接受不了,大量推广短期内存在一些困难。当前,在美国南部的平原地区有一种采收单行棉花的滚筒式结构采棉机得到广泛的应用,该采棉机的采摘头摘锭由一组倾斜安装的滚筒构成,在滚筒圆周上均匀的安装着毛刷和胶板,这种采棉机的采净率超过95,含杂率在30%左右。经过HV工检测系统(大容量棉纤维快速检测仪器)检测,滚筒式采棉书L采摘下的籽棉品级和水平摘锭采棉机的品级没有明显的差别。统收式采棉机作为选收式采棉机的一种补充,近几年在新疆得到广泛的研究。本项目研究对象胶棒滚筒式采棉机结构简单,土作部件价格低廉,以采棉机关键性能指标—采净率、总含杂率作为评价指标,开展对其影响因素的试验研究,综合评价各因素对采摘性能影响程度,达到优化采摘头关键结构及工作参数的目的,对胶棒滚筒式采棉机采摘头的设计其有重要的意义21世纪是农用机械化向智能自动化机械过渡的关键时期,工业智能自动化对现代农业发展规模化、多样化和精确化具有不可磨灭的重要性。随着农业生产要求的不断提高,许多农作物的采摘是一项劳动密集型的工作,随着采摘季节的要求,保证采摘质量至关重要。
采摘机器人是农业机器人的重要一部分,可充分利用机器人的信息感知能力,通过机器视觉识别被采对象的成熟度,从而保证棉花的采摘质量[1]。采摘机器人能够在降低采摘成本的同时提高棉花的采摘效率,并且棉花采摘机器人有很大市场缺口,其未来发展潜力巨大。摘机械手作为采摘机器人的核心部件,在采摘机器人的发展中起着至关重要的作用。
我国棉花种植历史悠久,棉花生产在世界棉花产业中占有举足轻重的地位。据统计,我国柑桔种植面积达万公顷,产量万吨。但是到目前为止,棉花的采摘工作都要靠人工完成。
我国是多种棉花的生产大国,由于缺乏有效可行的棉花采摘自动化机械,从而造成棉花采摘效率低下也是一个重要原因[2]。因此急需提供一种轻巧灵便的棉花摘采机械手,能够在保障人身安全的同时保护树、棉花不受损伤。将棉花采摘机械手与机器人相结合,大大提高了农业自动化水平,使得棉花的采摘更加高效便捷。
棉花采摘机械手是一种实用新型机械手,其最终目标是,确保人身不受伤害的前提下,提高棉花的采摘质量与采摘效率[3]。通过查阅相关资料与深入的调研,市场上相关产品较少且实用性不足,因此棉花采摘机械手的市场前景广阔。设计一款轻巧,灵便,满足使用要求的棉花采摘机械手变得十分迫切且意义重大[4]。
综上所述,该课题具有很强的研究探索意义。
参考文献
[1]宁志超. 基于ATmega16的六自由度棉花采摘机械手控制系统的设计[D].东北农业大学,2010.
[2]侯义锋.有色棉花采摘机械手的设计[J].农机化研究,2013,35(04):76-80+88.
[3]桑阳,刘军强,雷吟春.摘捡机械手的设计[J].价值工程,2013,32(31):63-64.
[4]王红军,李馨富,黄国钢,邹湘军.香蕉采摘机械手抓取机构设计及仿真[J].湘潭大学自然科学学报,2012,34(03):114-117.
[5]高浩,王虎,陈军.猕猴桃采摘机器人的研究与设计[J].农机化研究,2013,35(02):73-76.
[6]谭民,王硕.机器人技术研究进展[J].自动化学报,2013,39(07):963-972.
[7]王凤云,刘继展,李萍萍.采摘机器人末端执行器研究现状与展望[J].农机化研究,2011,33(11):10-14.
[8]胡海洪. 四自由度液压机械手液压系统设计[D].南昌大学,2012.
[9]梁喜凤,苗香雯,崔绍荣,王永维.棉花采摘机械手机构设计与工作性能分析[J].农机化研究,2004(02):133-135+139.
[10]张向珂. 采摘机械手障碍信息探测及避障技术研究[D].江苏大学,2010.
[11]杨文亮. 棉花采摘机器人机械手结构设计与分析[D].江苏大学,2009.
[12]山颖.零件的CAD设计[J].农机化研究,2004(06):246-247.
[13]陈斌. 基于OpenGL的抓取机械手的建模和动态仿真研究[D].北京化工大学,2008.
[14]谷雨明. 物料搬运机械手的系统分析与仿真[D].东北大学,2006.
[15]崔鹏,陈志,张小超.棉花采摘机器人仿生机械手静力学分析与仿真[J].农业机械学报,2011,42(02):149-153.
[16]濮良贵.机械设计[M].北京:高等教育出版社,2006.
[17] 申永胜.机械原理[M].北京:清华大学出版社,2004.
[18] 陈飞.基于 ADAMS 的棉花收获机械手仿真[D]. 江苏大学, 2008.
[19] Sistler F. Robotics and intelligent machines in agriculture[J]. IEEE Journal on Robotics & Automation, 1987, 3(1):3-6.
[20] Bachche S. Deliberation on Design Strategies of Automatic Harvesting Systems: A Survey[J]. Robotics, 2015, 4(2):194-222.
[21] 张水波. 棉花采摘机器人末端执行器研究[D].浙江工业大学,2011.
[22] 近藤直. 农业机器人[M]. 中国农业大学出版社, 2009.
[23] Altshuller B G. And Suddenly the Inventor Appeared TRIZ, the Theory[C]// of Inventive Problem Solving, Edition. 2010.
[24] 鲍官军, 张水波, 陈亮,等. 球采摘机器人的柔性末端执行器: CN101803511A[P]. 2010.



