





















履带式消防机器人的结构设计(说明书+CAD+三维建模)
摘 要
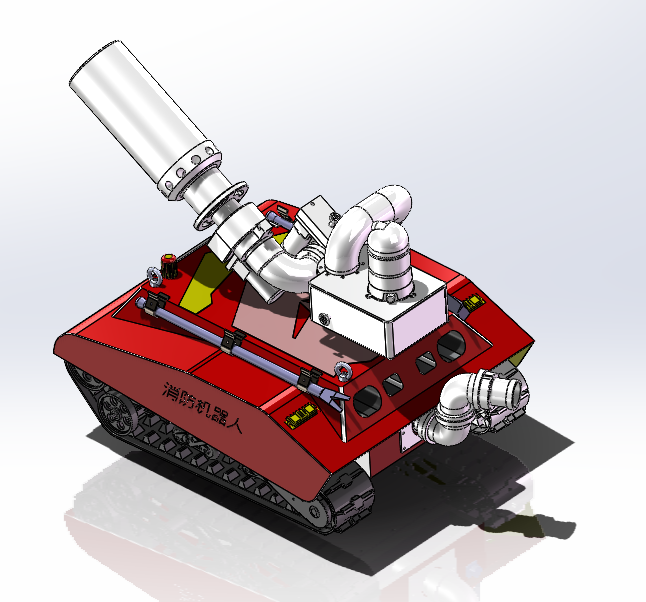
本文通过对消防机器人应用场合的研究分析,确定了总体方案为履带式消防机器人。将机器人划分为灭火、行走三个组成部分,从灭火装置、底盘结构、再到动力传递等方面对机器人进行了详细的结构设计和理论计算。通过CAD和Solidworks等绘图软件对相关部分进行了工程制图设计,包括灭火装置、整体机架、履带式底盘等;面对森林的恶劣环境,人工灭火非常困难。为了保障消防人员的生命安全,就需采用特定的机器人在特定的场合完成任务。因此,研究应对于森林火灾的灭火机器人对社会有着深远的影响。
关键词:灭火机器人;履带式;机械结构设计
ABSTRACT
Through research and analysis of the application scenarios of fire robots, this article determines that the overall plan is a tracked fire robot. The robot was divided into three components: firefighting and walking, and detailed structural design and theoretical calculations were carried out on the robot from the aspects of firefighting equipment, chassis structure, and power transmission. Engineering drawing design was carried out on relevant parts through CAD and Solidworks drawing software, including fire extinguishing devices, integral frames, tracked chassis, etc; Faced with the harsh environment of forests, manual firefighting is very difficult. In order to ensure the safety of firefighters, it is necessary to use specific robots to complete tasks in specific situations. Therefore, research on forest fire extinguishing robots should have a profound impact on society.
Keywords: firefighting robot; Crawler type; Mechanical structure design
目录
第一章 绪论 1
1.1课题研究背景及意义 1
1.2国内外消防机器人发展现状 2
1.2.1国内消防机器人发展现状 2
1.2.2国外消防机器人发展现状 2
1.3本课题研究内容 6
第二章 消防机器人总体方案设计 8
2.1 总体方案设计 8
2.1.1 行走方式的选择 9
2.1.2 灭火剂的选择 9
2.1.3 驱动方式的选择 9
2.1.4 控制系统的选择 9
第三章 消防机器人的机械部分设计 10
3.1底盘系统设计 10
3.1.1履带行走装置设计 10
3.1.2轮系装置设计 10
3.1.3箱体设计 12
3.2消防机器人喷水装置设计 12
3.2.1喷水效果的主要影响因素 13
3.2.2基本参数确定 13
3.2.3压力损失计算 13
3.3电机功率的校核 17
3.4 机械部分传动设计 21
3.5回转盘机 22
3.5.1构设计机电动机选择 22
3.6 履带驱动轮机构设计机电动机选择 22
3.7部分校核 主要参数计算方法及强度校核 23
3.7.1轮齿传动 23
3.7.2齿轮弯曲疲劳强度计算 24
3.7.3齿面接触疲劳强度计算 25
3.7.4 齿轮的许用应力 26
3.8蜗杆传动 27
3.8.1蜗杆传动的参数和几何尺寸 27
3.8.2 普通圆柱蜗杆承载能力的计算 29
3.8.3 蜗杆传动的强度计算 31
3.8.4普通圆柱蜗杆传动的效率、润滑和热平衡计算 32
3.9螺纹连接 34
3.10螺旋副的受力分析、效率和自锁 34
3.11螺栓连接的基本类型及螺纹连接件 36
3.12螺纹连接的拧紧和防松 36
3.13螺纹连接的受力分析 36
3.14螺栓连接的强度计算 37
第四章 消防机器人行走装置运动分析 40
4.1直线运动分析 40
4.2消防机器人爬坡运动分析 42
4.2.1纵向斜坡运动分析 42
4.2.2横向斜坡运动分析 45
第五章 消防机器人三维建模及虚拟装配 40
结束语 46
致谢 47
参考文献 48
第一章 绪论
1.1课题研究背景及意义
随着社会的不断进步和技术的不断发展,逐渐出现了机器人的概念。在发展初期人们对于机器人的功能和定位较为模糊,因此对其概念也没有形成统一认识。1987年,人们才对工业机器人有了明确清晰的定义,将机器人定义为一种高智能、灵活性的自动化机器。这些年随着机器人的不断完善,其在各行各业中开始普遍应用。消防机器人属于特种机器人范畴,其目前在消防救援中应用较为广泛,其可以有效代替消防人员进入缺氧、浓烟等危险环境中开展数据采集处理以及人员救护工作,对于消防工作的开展具有非常重要的作用。近些年来,人们户外运动的数量不断增多,导致每年发生的森林火灾也急剧上升。由于森林地形复杂,树木茂盛,可燃物多且场所较大,火灾事故一旦发生,将给森林消防员救援带来极大的难度。想要在森林这样的环境下完成救援任务,就必须具备特定的救援设备,否则不但完成不了灭火救援任务,可能还会造成重大的经济损失以及重大的人员伤亡。因此,消防机器人具有的性能将在灭火救灾中起到重要作用。
随着科技结合多元化的发展,消防机器人在不断更新完善,最大限度地满足当下的社会需求,在为社会经济发展保驾护航的同时,也让我们意识到消防机器人的合理运用,可以大大降低人员的伤亡,减轻消防员的救援难度,对社会具有极其重大的意义。如图1-1是近年国内外的消防机器人。消防机器人在消防工作开展中具有显著的优点,主要包括如下三个方面。一是消防机器人具有智能化特点,其集中了多种高科技技术,包括人工智能、自动控制以及神经网络等。其在消防工作开展过程中可以对现场的危险情况进行自主判断,进而采取相应的救援措施。二是无生命性损伤,消防机器人归根结底仍然属于机器的范畴,是一种无生命载体。因此其可以深入到浓烟、缺氧等复雜火灾现场,有效发挥消防人员所不具有的功能,降低人员伤亡,提高救援效率和质量[1]。三是可重复性使用,如果对消防机器人给予精心保养和完善,在工作中不遭受到致命的损坏,其可以在各种火灾现场反复使用,充分发挥其效能。目前消防机器人在消防工作中也存在两点不足。一是价格昂贵,消防机器人是各种先进技术的集合体,因此在研发过程中花费了大量的费用,企业为了能够尽快收回投资,会将其售价定位在较高的水平。通常来说,普通的消防部队难以配备这种先进设备。二是保养维护复杂,消防机器人属于高科技产品,对于保养维护具有较高的要求。因此相应的保养维护人员需要具备一定的专业基础知识,这样才能有效保障消防机器人处于良好的工作状态。



