





















教学楼走廊清扫机的设计(说明书+cad图纸全套)
摘要
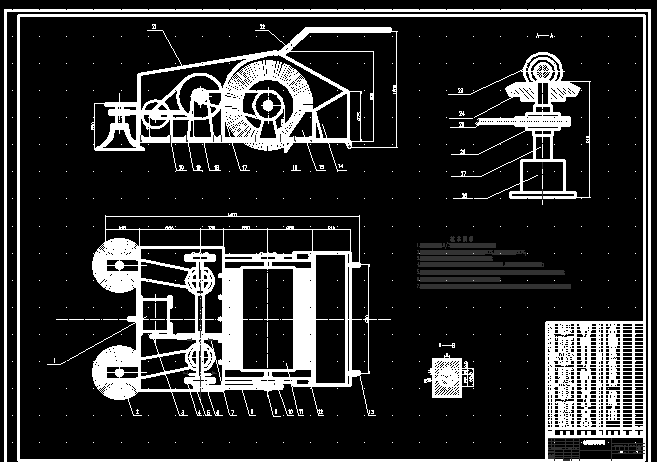
本文所设计的是用于教学楼走廊清扫的清扫机。能源装置通过传动系统将运动传给两侧的盘形刷,使其分别作顺时针和逆时针转动,将两侧的垃圾扫到中间,传给中间的滚刷。然后,再由滚刷将垃圾扫入垃圾箱内实现清扫功能。此设备属中小型清扫工具,可以对各种大小的垃圾进行清理,两侧的清扫刷可方便的清扫墙角及靠近障碍物的地方。
本次设计的内容是教学楼走廊清扫机的设计,主要分为以下几个部分:第一部分,确定走廊清扫机总体方案,动力源电动机的型号,确定走廊清扫机总体方案;第二部分,完成走廊清扫机基本功能、构造设计和功能原理的确定;第三部分,进行机械部分的设计、验算,给出零部件图和装配图。
本课题研究中,通过查阅搜集大量资料,对不同清扫设备进行分析对比最终确定出一种较为理想的教学楼走廊清扫机的设计方案,然后根据已定方案进行了具体结构的设计计算,并使该设备的结构更加紧凑可靠。确定出各个机构零部件的尺寸及型号后,并对其进行了校核以保证其能够满足设计要求。由于该设备的零部件相对比较普通易于制造,因此该设备的制造成本较低,是一种较为理想的经济实用的教学楼走廊清扫工具。
关键词:清扫机;盘形刷;滚刷;制造成本
第1章 前 言
1.1清扫工具的现状和发展前景
从20世纪60 年代我国研制生产路面清扫机械开始(指大型清扫机的研制),已有40 多年的生产历史,然而中小型清扫机的研制开发则刚刚起步。相对于发达国家,我国地面清扫机在销售规模、技术水平、清扫效果等方面都存在一定的差距。 随着公共环境卫生、工厂清洁机械市场的迅猛发展,2005 年之后,国内地面清扫机开始呈现快速发展的态势。但与国外相比,国内还停留在市场的初级发展阶段。
我国已逐步进入现代化社会,陈旧、落后的清扫方式及设备,已不能满足社会进步的需要。对于自动化扫地器具,人们常见的是马路上的扫地车,它能进行大面积街道清扫、工作效率高,并且节约人力。然而,小面积区域的清扫工具还主要沿用传统手工扫地工具:扫帚,工作效率低、清扫效果不够理想、浪费人力资源。而工作效率高的省时省力的庞然大物扫地车在比如厂区、居住小区、机关、学校、医院、小街小巷、教学楼走廊等场所,确是英雄无用武之地。随着现代生活节奏的加快及居住面积的增大,家居地面的清扫工作也越来越繁重,严重干扰了人们的生活。因此急需开发一种成本低、节约人力物力、清扫效果良好的适应院落、小区、小巷、教学楼走廊等小区域场所的小型清扫设备。
目前,许多国家研制的清洁机器人应时而生。日本,美国,欧洲各大厂商竞相开发,有些产品甚至很超前。例如,有一种具有高效吸尘除灰功能的清洁机器人,可遥控也可自主运作,能转向,躲避障碍物,有很高的实用价值,可对家居、厂矿企业等地面进行清洁,帮助人们从繁杂的劳动中解放出来。在国外清洁设备的拥有率和洗衣机几乎相当,甚至要高(有公用洗衣房,专业洗衣店的缘故)。在这方面,国内的研发步伐较慢,但是随着国家城市化的进程不断加大和经济的发展,许多新兴的中小城市正在崛起,城市化规模不断扩大,现代化的工厂不断建成,机关、小区、医院、学校和公共场不断建设机械化清扫已经成为一种必然,地面的清洁养护及工厂清洁生产已经越来越重要。劳动力成本的不断提高,清扫设备的市场前景日渐看好。
由于人们对环境污染问题越来越重视,燃油车在很大程度上受到限制。政府大力提倡绿色能源设备。近日国家出台燃油含税的政策,给电动扫地车带来福音。小型清扫设备因其实用性强、 垃圾清扫率高 、污染小、成本底、结构紧凑、操作简单、维修方便等特点具有广泛的市场前景和实用价值,它的出现和使用,将极大减轻人们繁琐的家务劳动,节省宝贵的时间,提高了人们的生活质量。小型清扫设备现在正是一个高速发展的时期,有着极其广阔的发展空。
1.2 清扫设备的概述
1.2.1 清扫设备的分类
清扫设备按大小可分为大型清扫设备和中小型清扫设备。大型清扫设备主要是清扫车,由于本课题主要研究的是小型清扫设备大型的清扫设备在此不再多述。而现有的小型清扫设备主要有两大类分别为扫地机和清洁机器人。
(1)清洁机器人:清洁机器人技术的发展,应该说是科学技术发展的一个综合性的结果,它集机械学、电子技术、传感器技术、计算机技术、控制技术、机器人技术、人工智能等诸多学科为一体。
清洁机器人是能够在房间中自动清洁地面,保持家庭卫生的一种机器人。它集机械学、电子技术、传感器技术、计算机技术、控制技术、机器人技术、人工智能等诸多学科为一体。包括有地面真空吸尘机器人、地面清扫机器人、壁面清洗机器人、泳池清洗机器人和一些特种清洗机器人,可用于各种场合的清洁工作。这方面的研究从上世纪80 年代起,开始受到人们的注意,不过由于清洁的环境基本上是结构、半结构性的,但要清除的垃圾则完全是非结构性的,造成一定困难。清洁机器人具有如下的特点:①清洁机器人自带电源,小巧轻便、操作简单、自主性强、具有很强的实用性。②清洁机器人的工作环境主要为普通家庭环境,但要求有较好的环境适应性。③清洁机器人的任务是清扫地面,工作的对象是地面的灰尘、纸屑以及其他一些小尺寸物体,而大尺寸物体不作为清洁机器人的处理对象。考虑到安全因素,清洁机器人必须对人及家庭物品等不构成任何危害,同时清洁机器人还必须具备自我保护的能力。就现有的技术而言清洁机器人的发展受到了很大的局限,它的推广也得到了一定的限制。
(2)扫地机:扫地机是现有技术下的最为经济实用的小型清扫设备。扫地机涉及地板上小面积地面覆盖物的清扫机械领域,是一种小型家庭、工厂、小区、机关用的扫地机械。它的一般是由车架、车轮、罩壳和手把组成的手推小车。在车前侧装设立扫帚;车架、罩壳下方装设横扫帚,通过半交叉皮带和齿轮等传动件由车轮旋转动力带动扫帚将垃圾扫入车架前端设置的撮箕内。从而避免了灰尘和废气污染与机动噪声。结构简单、操作方便。不清扫时能将扫帚抬起脱离地面。扫地速度在3—6 公里/时左右,扫地宽度在1~2 米。以圆盘刷为工具的新型扫地机,主要用于家庭以及公共场所地板或室内地面上覆盖物的清扫。
目 录
摘要···························································································Ⅰ
ABSTRACT································································· ················Ⅱ
目 录··························································································Ⅲ
第1章 前言··················································································1
1.1 清扫机的现状和发展前景···································································1
1.2 清扫设备的概述·················································································2
1.2.1 清扫设备的分类········································································2
1.2.2 我国清扫机械的发展趋势······························································2
1.2.3 发现的问题和解决途径·································································3
1.3 课题需要完成的任务·········································································4
1.3.1 设计主要内容·········································································4
1.3.2 设计工作基本要求·····································································4
第2章 总体方案设计····································································6
2.1 设计主要技术要求············································································6
2.2 总体方案的确定···············································································6
第3章 动力装置的确定································································10
3.1 蓄电池的选择················································································10
3.2 电动机的选择·················································································11
第4章 清扫机的结构设计····························································13
4.1 传动比的分配·················································································13
4.2 带轮的选择设计·············································································14
4.2.1 主轴带轮的设计计算··································································14
4.2.2 Ⅰ—Ⅱ轴带轮的设计计算······························································18
4.2.3 Ⅲ—Ⅳ轴的带轮设计··································································21
4.3 主轴的设计计算··············································································22
4.3.1 主轴的结构设计·····································································22
4.3.2 轴的校核············································································24
4.3.3 键的校核············································································27
4.4 锥齿轮的计算·················································································27
4.4.1 锥齿轮的计算········································································27
4.4.2 锥齿轮的校核计算····································································32
4.5 车架的设计计算·············································································33
结论························································································35
参考文献···················································································36
致谢·························································································37
附件1·····················································································38
附件2·······················································································49
参考文献
[1] 谭定忠,xxx启明,孔凡凯.自主移动清洁机器人运动学性能研究[M].哈尔滨:哈尔滨工程大
学机电工程学院,2004:10-25
[2] 李金山,李琳,谭定忠.清洁机器人概述[M].哈尔滨:哈尔滨工程大学机电学院,2005:15-45
[3] 濮良贵,纪名刚.机械设计[M].北京:高等教育出版社,2001:90-370
[4] 吴宗泽.机械设计师(上下册)[M].北京:机械工业出版社,2003:660-1250
[5] xxx旭,xxx积森.机械设计课程设计[M].北京:机械工业出版社,2003:1-350
[6] 李家宝.结构力学[M].北京:高等教育出版社,1999:120-365
[7] 邓星钟.机电传动控制[M].武汉:华中科技大学出版社,2001:90-150
[8] 毛谦德,李振清.袖珍机械设计师手册[M].北京:机械工业出版社,2003:300-1020
[9] 山东建筑工程学院.金属结构[M].机械电子工程系机械设计教研室,2004:100-260
[10]甄宗雷, 赵臣, 黄晶. 清洗机器人及其应用[M]. 哈尔滨: 哈尔滨工程大学机电学
院,2002:1-30
[11]成大先.机械设计手册(1-5 卷)[M].北京:化学工业出版社,2002:14-1200
[12]黄珊秋.机械设计课程设计[M].北京:机械工业出版社,1998:5-430
[13]郑玉华.典型机械产品构造[M].北京:科学出版社,2004:230-370
[14]廖念钊.互换性与测量技术[M].北京:中国计量出版社,2000:180-275
[15]xxx世刚.机械设计实践[M].哈尔滨:哈尔滨工程大学出版社, 2001:200-380
[16]于光瑜,秦惠民.材料力学[M].北京:高等教育出版社,1999:170-380
[17]曾志新,吕明. 机械制造技术基础[M]. 武汉:武汉理工大学出版社,2004:240-370
[18]xxx新喜.吸尘器的演进[M].北京:北京航空航天大学,1999:20-160
[19] 郑家骧,刘永田.画法几何及机械制图[M]. 内蒙古:内蒙古科学技术出版社,2002:10-360
[20] You Bum-Jae.Hwangbo Myung.etc.Development of a Home Service Robot IEEE
International Conference on Intelligent Robots and Systems.2003,3:2630~2635
[21]Toshininchi Illinova, Horsham Kinwra,Junichi shim and others A Transmission
Control System for Construction Machinery[J], SAE 901157 1-9.
http://www.bysj1.com/page.asp?id=37 http://www.bysj1.com/html/5859.html





