






基于RobotStudio的车身点焊机器人编程方案设计
摘要
随着科学技术的进步,工业机器人的大量应用,汽车市场不断的增加,体力劳动逐渐跟不上需求。
工业机器人点焊在微型车身装配焊接中有这很重要的地位,能有效的提高自动化生产水平,提高劳动生存率、产品质量及经济效益和改善工人劳动条件。在车身压条焊接方面,工业机器人焊接质量稳定,焊接精度高,参数可调,能保证焊缝、焊点均匀性。
关键词:工业机器人;自动化;点焊;编程及仿真
1 IRB4400工业机器人的结构与参数
1.1IRB4400工业机器人结构
IRB 4400工业机器人机拥有比较紧凑、运行极快的功能设计非常广泛适应大多数制造业需求。该型机器人在最高速度运行状态下的称重能力达60 kg,此外,该机器人结构比较坚固,具有非常好的平衡性,并采用TrueMoveTM专利技术, 在它的工作范围内均能保持平稳又快速的运动,从而确保制造领域的高质高效率产品制造。
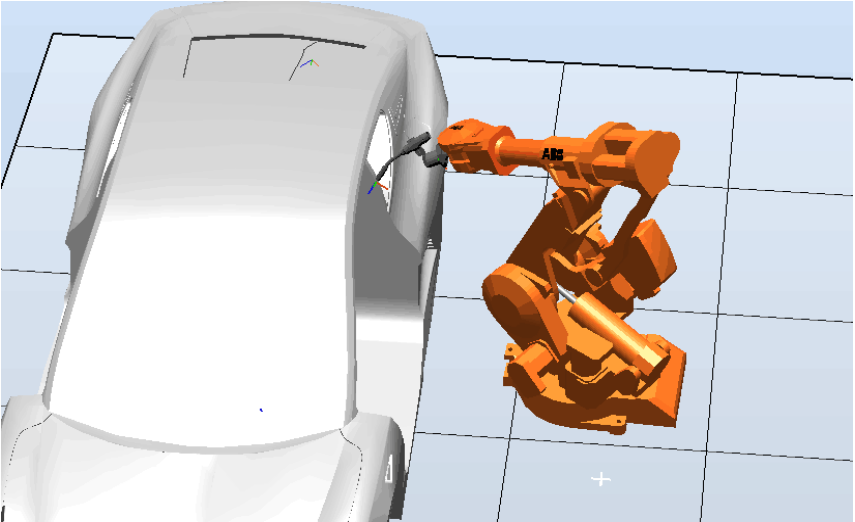
IRB 4400他拥有很高的机动性能,可充快速应对速度和柔性要求都较高的应用场合。他的紧凑性还能应用于其他机器人无法胜任的铸造、喷雾等。 (图1为机器人结构图)
IRB 4400结构比较坚固耐用,不需要经常维护。这个机器人采用了非常好的平衡性双轴承关节钢臂,装备的齿轮箱和电缆都达到了非常高的可靠性。
几种通信为设备集成铺平道路 IRB 4400机器人具备串口、网络接口、PLC、远程I/O等多种通信方式,能实现与小型制 造工位及大型工厂自动化系统的集成。
目录
摘要 Ι
1 IRB4400工业机器人的结构与参数 1
1.1IRB4400工业机器人结构 1
1.2 IRB工业机器人参数 2
1.3 IRB440机器人基本参数 3
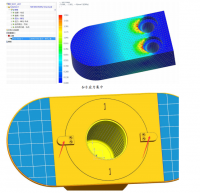
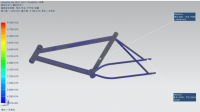
2点焊车身三维建模设计 5
2.1 点焊车身外形尺寸设计 5
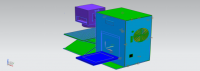
2.2 车身三维建模 6
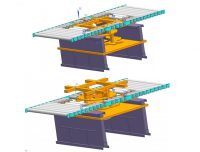
3 IRB 4400点焊机器人工作过程虚拟仿真 8
3.1 RobotStudio建模 8
3.2 焊接点 10
3.3 车身点焊编程及仿真 11
3.4 仿真程序 14
总结 15
参考文献 16
致谢 17
参考文献
1、刘小波:工业机器人基础(M) 北京:机械工业出版社 2016.8
2、叶晖:工业机器人虚拟仿真教程 (M) 北京:机械工业出版社2018.1
3、张涛:机器人引论(M) 北京:机械工业出版社2016.8
4、李荣雪:焊接机器人编程与操作(M) 北京:机械工业出版社2016.6
5、沈迪 、郑轶民: 工业机器人安装及调试[J]. 仪表技术, 2018(6).
6、叶辉:工业机器人典型应用案例精析[M],北京:机械工业出版社[M],2017.
7、彭广崴、汪炎珍、邓远华:UG NX 10.0机械三维设计项目教程 北京:航空工业出版社[M]2018.2



