






基于Rototstudio带变位机机器人方案设计
摘 要
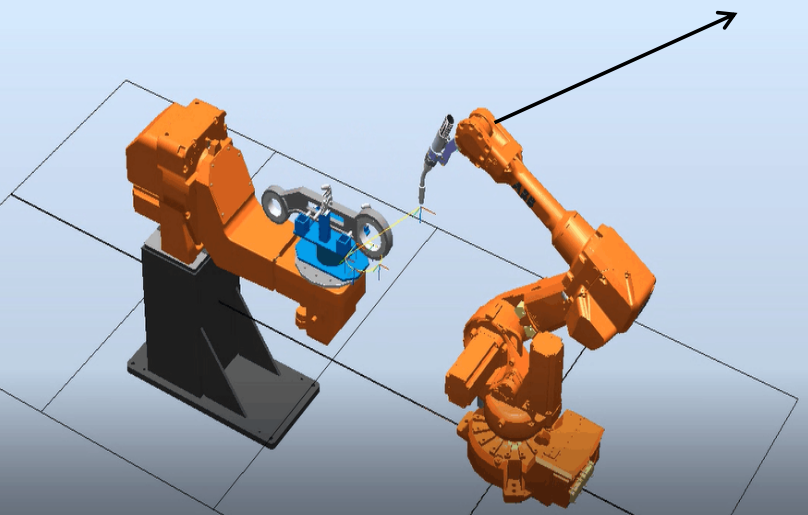
通过Robotstudio软件虚拟仿真的基础,确定IRB2600机器人在模拟仿真软件系统中建立起带变位机的应用系统。利用Robotstudio软件,UG建模、带导轨、变位机组件的使用,完成带变位机在仿真软件中运行轨迹,得出带变位机在实际生活中提高了工业机器人运作效率,提高工厂里面生产效率。
关键词:Robotstudio软件、IRB 2600机器人、UG建模 、带变位机
1 IRB 2600机器人结构与参数
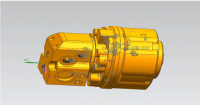
1.1 ABB IRB2600工业机器人的结构
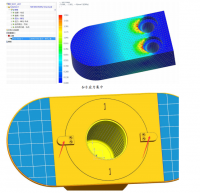
IRB 2600的精度为同类产品之最,其操作速度更快,废品率更低,在扩大产能、提升效率方面,将起到举足轻重的作用,尤其适合弧焊等工艺应用。其高精度有专利的TrueMoveTM运动控制软件实现。
目 录
摘要 I
1 IRB 2600机器人结构与参数 1
1.1ABB IRB2600工业机器人的结构 1
2.2IRB 2600工业机器人的参数 1
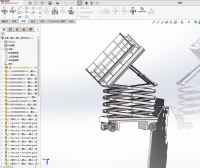
2导轨和工作台三维设计 4
2.1设计内容(步骤) 4
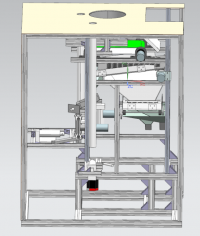
2.2导轨图纸与导轨的UG建模 4
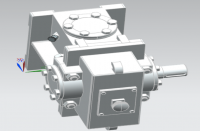
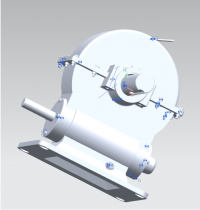
2.3工作台的草图与UG建模 6
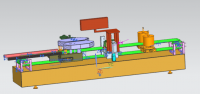
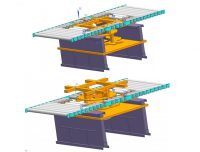
2.4总装完成 7
3 IRB 2600机器人带变位机的虚拟仿真过程 9
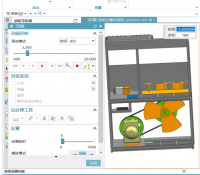
3.1Rototstudio软件搭建工作站 9
3.2创建运动轨迹 10
3.3机器人IRB 2600仿真过程 12
3.4IRB2600机器人仿真程序设计 16
总结 18
参考文献 19
致谢 20
总 结
在现在的生活和生产中,有许多恶劣的工作环境和一些需要多年工作经验的高精度制造工业,随着社会的发展工业机器人随之出现,替代了这些行业,现在机器人已经成为了的大部分重工业的一线工作人员,大大提高了生产效率。但现在的机器人的发展也受到了一些限制,比如工作姿态、工作范围的限制和工作距离的限制都影响的机器人的工作效率和生产成本,那么如何解决问题成为重大课题。
本次毕业产品的应用就告诉了我们如何解决这些问题,带变位机系统的建立可以加强机器人的工作范围和生产精度降低生产成本,带变位机的作用就是改变机器人的极限位置让机器人更加方便的到达生产位置,加快了编程提高自动化生产,本人相信在以后的生产中会有更多的像带变位机的出现让我现在的生产变得更好。
参考文献
[1]隋欣. 《ABB工业机器人仿真》教学设计——基于RobotStudio[J]. 现代商贸工业, 2016, 37(31):167-168.
[2]方向明, 方明, 刘天元,等. 基于虚拟现实技术的机器人仿真设计研究[J]. 长春理工大学学报(自然科学版), 2016(1):61-65.
[3]王超, 邓卫国. 基于Robotstudio的"工业机器人仿真技术实训"课程开发与教学设计[J]. 辽宁省交通高等专科学校学报, 2017, 19(5):64-67.
[4]郝建豹. 工业机器人技术及应用课程建设的探索[J]. 广东职业技术教育与研究, 2017(1):28-31.
[5]王丽君, 陈罗凤. ABB机器人MoveJ与MoveL指令的教学设计[J]. 电脑迷, 2018(10).
[6]武保同, 吕朋, 于鲜. 基于Robcad点焊机器人离线编程技术应用[J]. 汽车工业研究, 2018(1):25-29.



