
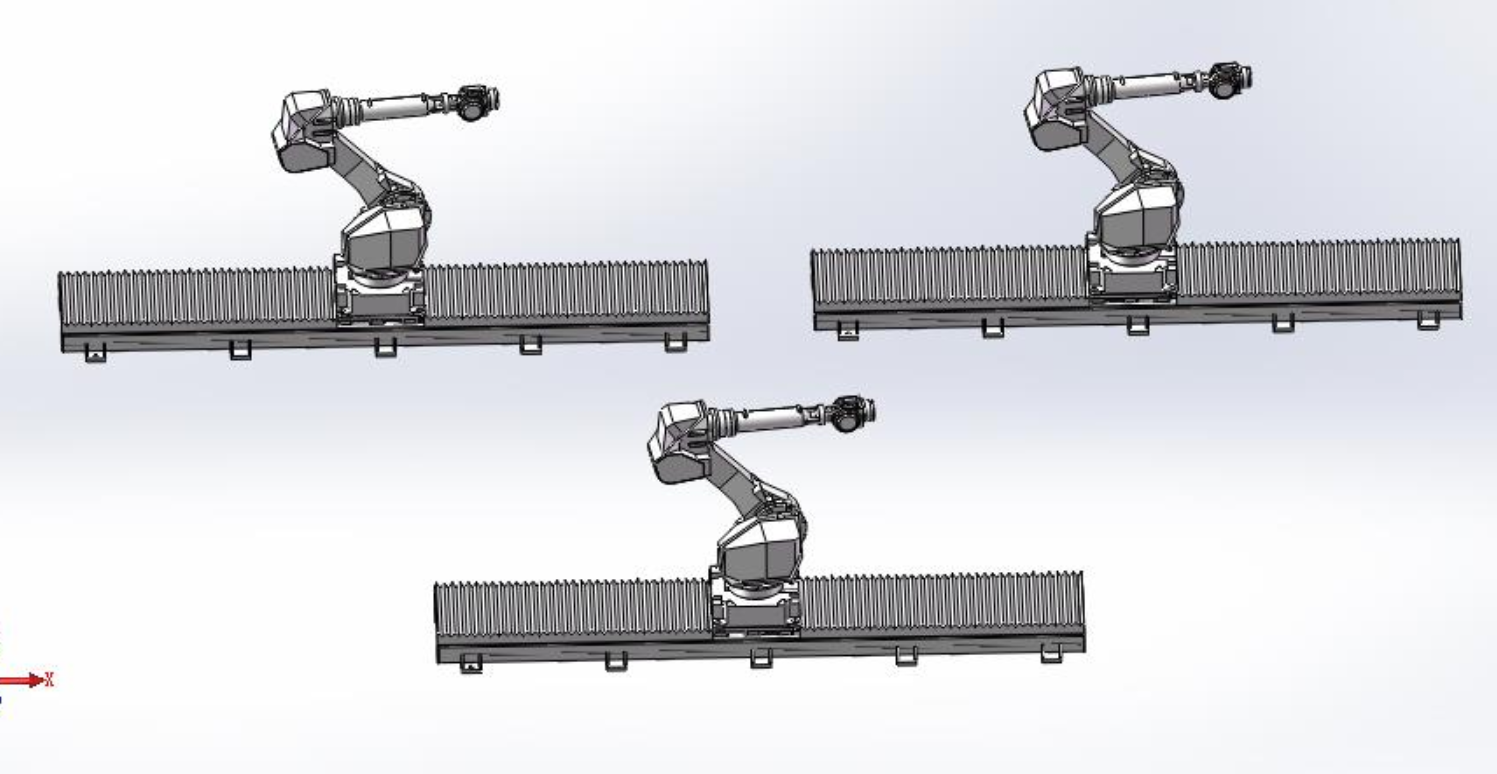






焊接机器人第七轴直线型轨道设计
摘 要
随着科技的发展,焊接技术成为了当下越来越受欢迎的一门技术。在钢材的的生产加工中,焊接是不可或缺的,比如飞机汽车的制造产业中,没有焊接工艺是无法实现的。所以,随着各项技术的快速发展,国内外的焊接技术也在迅速地发展中。
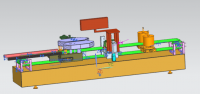
我这次设计的是焊接机器人第七轴直线型轨道,是一个自动的焊机,它的体型较小,控制简单,智能化程度比较高。
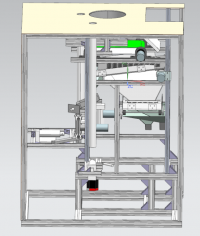
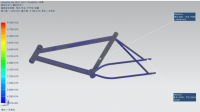
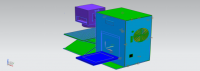
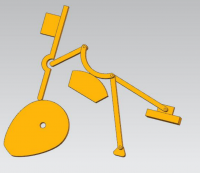
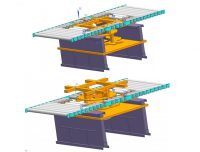
在设计的过程中,首先对点焊机的整体结构进行了规划,然后利用设计出了各个零件的二维图,以及与之相应的工程图。
关键词:焊接技术;导轨焊机;整体结构;绘图软件
Abstract
With the development of science and technology, welding technology has become more and more popular at present. In steel production and processing, welding is indispensable, such as automobile and aircraft manufacturing industry, there is no welding process is unable to realize. So, along with the rapid development of the technology, the welding technology at home and abroad is also developing rapidly.
I the design is guide rail type welding machine, is an automatic welding machine, its small size, simple control, intelligent degree is relatively high.
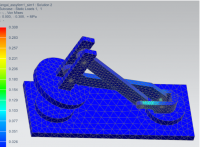
In the design process, first of all, the overall structure of spot welding planning, then the design out of the various parts of the three-dimensional map, and corresponding engineering drawings, in the end, the simulation.
Key words: welding technology; welding machine; integral structure; drawing software
目录
焊接机器人第七轴直线型轨道设计 1
摘 要 1
Abstract 2
Key words: welding technology; welding machine; integral structure; drawing software 2
第一章 绪论 3
1.1 焊接技术的概述 4
1.2 焊接技术的发展趋势 5
1.3 现代焊接技术的运用及特点 6
1.4 做本课题的意义 7
本章小结 8
第二章 焊接机器人第七轴直线型轨道总体结构设计 9
2.1焊接机器人第七轴直线型轨道总体要求和技术指标 9
2.2 焊接机器人第七轴直线型轨道总体方案的确定 9
2.3焊接机器人第七轴直线型轨道的设计基本思路 9
2.4小车行走机构 10
2.4. 1 基本工作原理 10
2.4.2 行走机构车体设计要点 11
2.4.3 行走机构滚动组件的设计要点 11
2.5 焊丝送进机构 12
2.6 焊枪摆动机构 13
2.7 焊接轨道 13
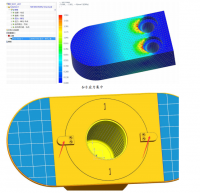
2.8行走机构的设计计算 15
2.8.1 等效负载转矩计算 15
2.8.2 等效转动惯量的计算 15
本章小结 16
3.1 电机的选择 18
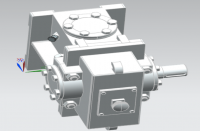
3.2 减速器的结构及传动比 19
3.3 送丝机构的机械传动 20
3.3.1 送丝电机的选择 20
3.3.2 减速器 21
3.4 焊枪姿态调整机构的机械传动 21
3.4.1 电机的选择 22
本章小结 22
第四章焊接机器人第七轴直线型轨道的PLC控制系统设计.............23
本章小结 26
结 论 28
参考文献 29
出版社 29
参考文献
(1)机械设计手册编委会.机械设计手册.北京:机械工业出版社,2004.
(2)成大先.机械设计手册(机械传动).北京:化学工业出版社,2004.
(3) 焦向东等.球罐外圆焊接机器人智能控制系统.焊接学报,2000,21(4):1~4.
(4) 朱进满.焊接机器人的应用[J].现代制造,2005,12:42~47.
(5) 张应力,现代焊接技术,金盾出版社2011
(6)郭红星,宋敏,机械设计基础,西安电子科技大学出版社,2006;
(7)陈富安,数控原理与系统,人民邮电出版社,2006;
(8) 蓝汝铭,SolidWorks2005机械设计基础教程,西安电子科技大学出版社,2006;
(9) 罗庚合,黄万长,数控机床故障诊断与维修,国防工业出版社,2010;
(10) 方晨,AutoCAD2007机械制图教程,上海科学普及出版社,2008
(11) 高广镇,田东,段辉,SolidWorks2008机械设计 一册通,电子工业
出版社
(12) 焊接技术,电子资料
(13) 嵇宁,数控加工编程与操作,高等教育出版社,2008
(14) W.-S Yoo,J.-D. Kim,S.-J. Na.A Study on A Mobile Platform-manipulator Welding System for Horizontal Fillet Joints[J].Mechatronics,2001,11:853~868.



