





















基于MotoSim-EG的工业机器人虚拟示教与编程的研制
一、选题简介、意义
随着自动化发展水平的不断提高,工业机器人在工业生产中的地位越来越重要。
本课题受国家战略“中国制造2025”计划的启发。自出现至今短短几十年中,机器人技术的发展取得长足进步,伴随产业变革的兴起和全球竞争格局的全面塑造,机器人展业发展越来越受到世界各国的高度关注。我国工业机器人产业迎来爆发性的发展机遇,然而,现阶段我国制造业面临资源短缺、劳动力成本上升、人口红利减少等压力,而工业机器人的应用与推广,将极大提高生产效率和产品质量,降低生产成本和资源消耗,有效提高我国工业制造竞争力。工业机器人现已广泛应用于汽车及零部件制造,电子、机械加工,模具生产等行业已经实现自动化生产线。
工业机器人在现代制造业系统中起着极其重要的作用,伴随着机器人技术的不断提升,工业机器人的三维仿真技术也随之得到广泛关注。本课题研究安川公司MOTOMAN系列的离线编程示教仿真软件MotoSim-EG进行工业机器人的基本操作。通过此课题,在生产过程中进行模拟仿真,将工业机器人的运动方式以动画的方式显示出来,直观的显示工业机器人及整个生产线的运动情况,能够有效的辅助设计人员进行工业机器人虚拟示教、工作站布局、工作姿态优化等。
现阶段我国工业机器人领域人才储备数量严重短缺,对企业而言,从工业机器人的基础操作维护人员到高端技术人才普遍存在巨大缺口,缺乏经过系统培训、能熟练安全应用工业机器人的人才。企业的生产方式也应该有一定的改变,生产方式应向柔性,智能,精细转变,构建新型智能制造体系迫在眉睫,对工业机器人的需求呈现大幅度增长。为了培养此方面的高端人才以及降低公司的成本,需要每家机器人公司研发出一种虚拟示教的系统用来实践,这样一来不仅降低了成本同时也能很好的培养工业机器人专业领域的高端人才以及基础操作维护人员。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
(一)主要内容:
本课题是以自动化生产为设计依据,以MotoSim-EG模拟仿真示教为基础开发进行智能化的搬运。
(二)拟解决的主要问题:
1.安川工业机器人的单元模块设计;
2.安川工业机器人的虚拟示教及编程;
3.安川机器臂的控制系统的软件设计;
(三)预期目标:
根据项目需求,机器臂在MotoSim-EG的示教下,实现搬运工件以及抓取工件等功能操作。
(四)研究步骤
本课题的工作步骤分为四个阶段:
第一阶段:查阅文献,调研、收集资料、确定课题方案,完成开题报告;
第二阶段:安装虚拟示教软件,进行结构设计、MotoSim-EG的编程;
第三阶段:进行模拟示教与编程,并整改不足。
第四阶段:整理技术资料,完成毕业设计论文及答辩。
(五)工作方法及措施:
工作方法:本课题主要采用实验法。
措施:基于虚拟示教与编程所获得的实践经验,在教师指导下,以MotoSim-EG为基础,设计开发
三、设计(论文)体系、结构(大纲)
第一部分 引言
1.1工业机器人定义
1.2工业机器人的技术参数
1.3课题来源及研究意义
1.4国内外工业机器人的研究与应用概况
1.5工业机器人的优点
1.6本文的主要研究内容
第二部分 MotoSim-EG软件的安装与设置
2.1 编程语言简介
2.2软件安装步骤
2.3 软件调试系统及软件打开步骤
第三部分 基于环境对工业机器人建模
3.1 虚拟仿真环境的建立
3.2工件以及作台的建立
3.3机械手抓模型建立
第四部分 基于MotoSim-EG虚拟示教完成搬运模块
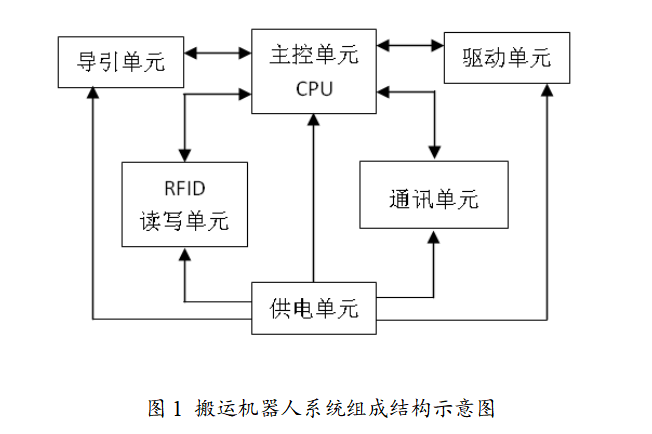
4.1搬运机器人概述
4.2搬运机器人编程与示教
第五部分 总结和展望
参考文献
致谢



