





















动态系统上检测特征值转向交叉方法设计
在一般动态系统上检测特征值转向/交叉的方法介绍。图2AB点就是一个转向例子。当有两个特征值轨迹相互远离时,他们的轨迹曲率显示曲线方向有突然的变化。Perkins 和 Mote [7]提出了转向/交叉标准俩估计在临近转向去的轨迹曲率的独特特征。让λr和λs做为两个特征值围绕B点接近对方作为一个参数是多种多样的。在B处特征值不受干扰的是(λr,Φr) 和 (λs,Φs)。在B处应用泰勒展开,位点的特征值近似
是一个小扰动可变参数。λ=λ/;λ= 。二阶导数λr andλs 用来描述轨迹曲线。假如λr λs 0,两个轨迹是独立且自由的相互交叉。假如λr , λs 0,轨迹交叉且转向发生。作为一个特殊的特征值,特征值二阶导数是
在临近转向是当λr≈λs时λr andλs被一个小分母限制,那是
耦合系数r和s 近似局部曲率。它们被用于估计转向强度。
2b图显示14 18转向轨迹14和18在图2a中的可变参数ksp。注意图2b急剧变化的振动模式。这两个转向位点交换模式从点A至C ,即使轨迹不相交。这个模式在B点有很强的联系性且不像任何在转向区外的转向模式。在转向区当参数调整,振动模式的急剧变化可以对工况动态响应,齿轮负载,负载分配,轴承强度产生巨大影响而且可能导致模态局部化。在何种程度上个体模式的动态啮合力(即模态力)也变化急剧作为转向改变模。
转向准则可以应用在当λs=…=λsm1退化多个m时。特征值二阶导数是
当指数总和k=1,…L,但k s,…, s+m -1。当另一个特殊特征值λr接近λi,这个主项在公式5和3中时
假如λr=…λr+n-1也去掉,耦合系数是
假如耦合系数全为零,λr和λs轨迹重合,否则转向发生。下面是检验条件
三.行星齿轮转向模型
当适用于行星(或任何行星)齿轮,上述结果归纳为特别简单的形式,因为独特的结构振动模式。所有行星齿轮振动模式可在假设下的循环对称行星之间分为以下类型[10] 。分析仅限于本常用的行星齿轮。
1.有特殊固有频率的六旋转方式。它们有绝对旋转的轴,环和恒星轮。xh yh 0, h c, r, s。所有的行星轮有相同的挠度
2 六对平移模式缺少两个固有频率。它们有绝对平移的轴,环和恒星轮。uh 0, h c, r, s,作为一对标准正交的平移模式Φi 和 Φj ( MΦj 0), ,上标i和j各自表示Φi 和 Φj。行星挠度存在联系
当行星轮相同时n=2(n-1) /N
3.三个成组的行星轮模式其中缺少N-3个固有频率。他们有不动的轴,环和恒星轮,xh=yh =uh=0, h=c,r, s,行星挠度关系式
wn是N-3的独立标量满足 nsinn , ncosn , n=0
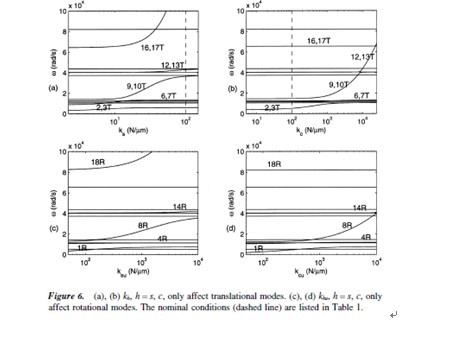
两个接近行星齿轮轨迹可以与任何上述三种类型的模式有关。这特殊的模型如公式10-12可以用于分析行星轮转向。具体来说,让恒星行星啮合刚度ksp是可变参数(图1)和M=0。




