





















基于嵌入式系统的自走车研制
摘 要:本论文的设计目的是实现模糊 PID 控制应用自走车的运转, 由红外线传感器、超音波传感器等做四轮自走车的自主性避障控制 动作,可以让四轮自走车前进、左右、后退等稳定智能控制且降低行驶时的危险设计是以模糊 PID 控制使自走车控制不依 赖系统的模型可稳定控制真正实现模糊 PID控制器的优点应用。
关键词 :模糊PID;控制、;红外线传感器、;超音波传感器 ;智能控制
The development of Self propelled vehicle
Abstract:This thesis is designed to achieve the fuzzy PID control application of self-propelled vehicle running. This system uses infrared sensors and ultrasonic sensors for four self-autonomy of the vehicle obstacle avoidance control action. The system allows four self-propelled the car forward, left and right, back stable intelligent control and reduce the risk of driving phenomenon. Moreover, the design is based on fuzzy PID control driven from the vehicle control system does not depend on the model can be stable driving control, and truly realize the advantages of application of fuzzy PID controller.
Keywords: Fuzzy PID control;infrared sensors;ultrasonic sensors;intelligent con
目录
第一章 绪论 10
1.1 前言 10
1.2 研究动机与目的 10
第二章 模糊理论 11
2.1 模糊理论 11
2.2 模糊推论系统 11
2.3 PID功能的模糊控制器 13
第三章 自走车系统设计 15
3.1 自走车系统设计 15
3.2 微控制器 15
3.3 89C52 微芯片控制器接脚图 17
3.4 马达驱动模块 20
3.5 介绍马达驱动模块和图 20
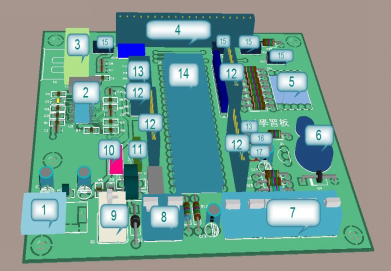
3.6 马达驱动板透视图 21
3.7 红外线感应模块 29
3.8 超音波传感器 29
第四章 实验验证 38
4.1 两轮伺服超音波避障控制 38
4.2 模糊控制器的控制规则 48
第五章 结论与未来展望 52
5.1 结论 52
5.2 未来展望 52
致谢 53
参考文献 54
参 考 文 献
[1] 高钦和. PLC应用开发案例精选【M】. 北京:人民邮电出版社,2008.
[2] 刘晓春. 电气控制与PLC技术应用【M】. 北京:电子工业出版社,2009.
[3] 魏召刚. 工业变频器原理及应用【M】.北京: 电子工业出版社,2006.
[4] 李方园. 变频器自动化工程实践【M】. 北京:电子工业出版社,2007.
[5] 施利春. PLC与变频器【M】. 北京:机械工业出版社,2007.
http://www.bysj1.com/ http://www.bysj1.com/html/3215.html http://www.bysj1.com/html/5215.html



