













(研究生论文代写)平面光学相关器畸变不变识别研究及结构优化设计探索
摘 要
传统的基于 4F 结构的光电混合识别相关器,普遍存在体积大、各元件分离固定、
稳定性差、制作成本高等缺点,限制了其实用性。本实验室提出的新型平面光学相关器
结构能有效压缩光路系统体积、提高集成度,为相关器的实用化提供了一种较好的解决
方案。在此基础之上,本文分析研究了该结构系统对畸变目标的识别问题,基于 OTSDF
算法设计了能够较好的对畸变目标进行识别的滤波器,并搭建了等效实验光路系统进行
识别验证。分析了系统中各元件与设计位置偏差时对系统输出的影响,设计和制作了系
统所要用到的离轴二元光学菲涅尔反射透镜。对系统结构进行优化,把结构改进成 2F
结构和无需物理透镜的 2F 结构的平面光学相关器,体积减小到原来的 1/2。本文的主要
研究工作有:
(1) 结合平面光学和传递函数理论,搭建了系统的仿真模型。分析了目标图像角度
旋转、比例缩放、视角变化对系统识别的影响。
(2) 基于 OTSDF 算法,设计了适合本系统的能够对角度旋转、比例缩放、视角变
化的畸变目标进行较好识别的滤波器。
(3) 搭建等效系统光路,对系统和滤波器进行了验证。在实验上实现了?60度范围
内角度旋转和55%~145%范围内比例缩放畸变目标的识别。
(4) 全面分析了系统中各元件位置偏差对系统输出的影响,设计了系统中的离轴二
元光学菲涅尔透镜和掩模板,在实验室制作出了透镜的样品。
(5) 把实验室提出的 4F 结构平面光学相关器模型优化设计成 2F 结构,体积减小到
原结构的一半,并对系统进行了模拟验证。
(6) 进一步优化设计,得到不需要物理透镜的 2F 结构的平面光学相关器,其结构更
简单、性能稳定、可编程。对系统进行了模拟验证。
本文关于系统中畸变目标的识别研究,对相关器的实用化是有现实意义的。对系统
中元件位置偏差的讨论方法和结论普遍适用于各种光学相关器系统,为相关器系统的实
验、装配、稳定性和故障分析提供了参考。改进的 2F 和无透镜 2F 相关器结构,结构更
简单,体积更小,实验上更容易实现,是相关器小型化和集成化的优选方案。
关键词:光学相关器;畸变不变识别;匹配滤波器;二元光学;2F 结构相关器
Distortion invariant pattern recognition of planar optical correlator and structural optimization design
exploration
Ⅱ
Abstract
The traditional 4F system structure opto-electronic hybrid correlator has some common
disadvantages. Such as, large volume, separate fixed components, poor stability, high
manufacture cost etc. A novel planar optical correlator structure proposed by our laboratory
can effectively compress the system volume, and can be integrated. Based on it, this thesis
researched the recognition problem of distortion targets in the system. OTSDF algorithm was
applied to design the filter which can achieve invariant recognition for distortion targets. An
equivalent experimental optical system was built, and the performance of distortion invariant
recognition was verified. Discussed the system output change when the components deviation
from the designed position. Designed and produced the off-axis binary optical Fresnel
reflection lens in the system. The original 4F system structure was optimized, and got the 2F
and lensless 2F planar optical correlator structures, and the volume was reduced to half of the
original system. The main work of this thesis is as follows.
(1) Combining plane optics and transmission function theory, the simulation model of the
system was built. The recognition for rotation, scale, angle of view change target image in
system was discussed.
(2) Based on OTSDF algorithm, designed the distortion invariant filter for the system
which can efficiently recognize distortion targets.
(3) The equivalent optical system was built, the system and filter were verified in
experiment, and ±60 degrees angle rotation and 55%~145% range scaling distortion target
were recognized well.
(4) The system output impact when the component deviate from the designed position
was discussed. Designed and produced the off-axis binary optical Fresnel reflection lens in
the system.
(5) The original 4F structure was optimized to 2F planar optical correlator structure, the
system reduced to half, and simulation results verified the system.
(6) 2F structure was optimized to lensless 2F structure, and simulation results verified
the system.
Distortion invariant pattern recognition of planar optical correlator and structural optimization design
exploration
Ⅱ
The research of distortion invariant recognition had significance to the practical
application of correlator. The analysis of components position deviation provided the
reference to correlator experiment, assembly, stability, and failure analysis. The optimized 2F
and lensless 2F planar optical correlator structures are simpler, smaller, easier to realization,
and it’s more appropriate to achieve integrate.
Key word: optical correlator; distortion invariant recognition; match filter; binary optics;
2F structure correlator
目 录
摘 要………………………………………………………………….Ⅰ
Abstract…………………………………………………………………Ⅱ
第1 章 绪论 ............................................................................................ 1
1.1 引言 ................................................................................................................... 1
1.2 光学相关器的发展概况 ................................................................................... 2
1.2.1 光学相关器国内外研究现状 ..................................................................... 2
1.2.2 畸变不变识别研究现状 ............................................................................. 4
1.3 论文选题来源和工作基础 ............................................................................... 6
1.4 主要研究内容、创新点及研究意义 ............................................................... 7
1.4.1 论文的主要研究内容 ................................................................................. 7
1.4.2 论文的创新点 ............................................................................................. 8
1.4.3 本论文的研究意义 ..................................................................................... 8
第2 章 论文研究的理论基础 ................................................................ 9
2.1 透镜的傅里叶变换原理 ................................................................................... 9
2.2 空间光调制器原理与抽样特性 ................................................................... 10
2.2.1 电寻址液晶空间光调制器的基本原理 ................................................. 10
2.2.2 电寻址液晶空间光调制器的抽样特性 ................................................. 11
2.3 二元光学与自由空间平面光学 ................................................................... 13
2.3.1 二元光学 ................................................................................................. 13
2.3.2 自由空间平面光学 ................................................................................. 14
2.4 平面光学相关器结构和原理 ....................................................................... 14
2.4.1 传统 VLC 型光电混合相关识别原理 ................................................... 14
2.4.2 平面光学相关器结构和原理 ................................................................. 16
2.4 本章小结 ....................................................................................................... 17
第3 章 平面光学相关器畸变不变识别分析及设计 ........................ 18
3.1 平面光学相关器系统仿真模型建立 ........................................................... 18
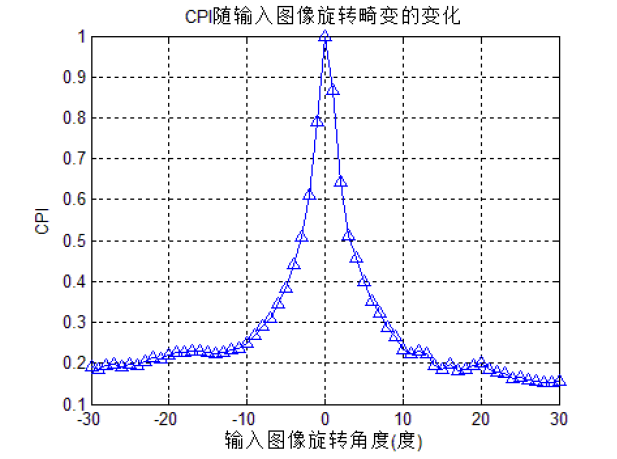
3.2 目标图像畸变对系统识别的影响 ............................................................... 21
3.2.1 输出相关峰质量评价指标 ..................................................................... 21
3.2.2 待识别目标角度旋转对识别的影响 ..................................................... 23
3.2.3 待识别目标比例缩放对识别的影响 ..................................................... 25
3.3.4 待识别目标视角变化对识别的影响 ..................................................... 26
3.3.5 待识别目标同时存在旋转和比例缩放时对识别的影响 ..................... 27
3.3 畸变不变匹配滤波器设计 ........................................................................... 28
3.3.1 SDF 滤波算法原理 ................................................................................. 29
3.3.2 OTSDF 匹配滤波器设计 ........................................................................ 33
3.4 OTSDF 匹配滤波器畸变不变容限研究 ....................................................... 35
3.4.1 旋转畸变目标的识别容限分析 ............................................................. 35
3.4.2 比例缩放畸变目标的识别容限分析 ..................................................... 36
3.4.3 视角畸变目标的识别容限分析 ............................................................. 37
3.4.4 同时存在旋转和缩放畸变目标的识别容限分析 ................................. 38
3.5 本章小结 ....................................................................................................... 39
第4 章 平面光学相关器畸变不变识别实验研究 ............................ 40
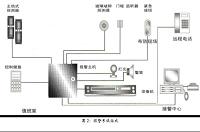
4.1 平面光学相关器等效实验系统搭建 ........................................................... 40
4.1.1 实验光路系统结构 ................................................................................. 40
4.1.2 输入 SLM 和滤波 SLM 的频率匹配 .................................................... 42
4.1.3 滤波器在 SLM 上的加载 ...................................................................... 43
4.1.4 实验效果验证 ......................................................................................... 44
4.2 系统畸变不变识别实验 ............................................................................... 45
4.2.1 角度旋转畸变目标的识别 ..................................................................... 45
4.2.2 比例缩放畸变目标的识别 ..................................................................... 46
4.2.2 同时存在平面旋转和比例缩放畸变目标的识别 ................................. 47
4.4 本章小结 ....................................................................................................... 49
第5 章 相关器系统各元件偏差对识别性能的影响 ........................ 50
5.1 系统各元件可能存在的几种偏差情况 ....................................................... 50
5.2 系统各元件偏差对系统输出的影响分析 ................................................... 51
5.2.1 输入面 SLM1 的偏差对系统输出的影响 ............................................ 51
5.2.2 第 1 个傅里叶变换透镜的偏差对系统输出的影响 ............................. 53
5.2.3 滤波面 SLM2 的偏差对系统输出的影响 ............................................ 54
5.2.4 第 2 个傅里叶变换透镜的偏差对系统输出的影响 ............................. 55
5.2.5 CCD 接收面偏差对系统输出的影响 .................................................... 56
5.3 平面光学相关器元件偏差分析汇总 ........................................................... 57
5.4 本章小结 ....................................................................................................... 58
第6 章 平面光学相关器新结构设计探索 ........................................ 59
6.1 离轴二元光学菲涅尔透镜设计与制作 ....................................................... 59
6.1.1 离轴二元光学菲涅尔透镜设计 ............................................................. 59
6.1.2 普通透镜与离轴二元光学菲涅尔透镜性能比较 ................................. 60
6.1.3 离轴二元光学菲涅尔透镜的设计与制作 ............................................. 61
6.2 基于2F 结构的平面光学相关器设计 ......................................................... 63
6.2.1 光学相关器结构设计应该满足的条件 ................................................. 64
6.2.2 一种 2F 结构平面光学相关器实现方法 .............................................. 66
6.2.3 2F 结构平面光学相关器模拟验证 ........................................................ 67
6.3 无透镜2F 平面光学相关器设计 ................................................................. 69
6.3.1 一种无透镜 2F 结构平面光学相关器结构 .......................................... 69
6.3.2 无透镜 2F 结构平面光学相关器模拟验证 .......................................... 70
6.4 本章小结 ....................................................................................................... 71
第七章 总结与展望 ............................................................................ 73
参考文献………………………………………………………………7 5
致 谢…………………………………………………………………7 9
平面光学相关器畸变不变识别研究及结构优化设计探索
1
第 1 章 绪论
1.1 引言
光学相关模式识别(Optical Correlation Pattern Recognition,OCPR)技术,起源于
20 世纪 60 年代。早在 1873 年,Abbe 研究显微成像时发现了空间滤波[1],但由于没有
合适的相干光源,基于空间滤波的光信息处理技术发展缓慢。直到 1960 年,激光这种
强相干光源的出现大大推动了光信息处理技术的发展。1962 年,Mclachlan 首次提出用
光学相关来实现模式识别的思想[2];1964 年,Vander Lugt 提出了匹配滤波(Matched
Filters,MF)的概念,设计出第一台匹配滤波光学相关器(Vander Lugt Correlator,VLC)
[3];1966 年,C.S.Weaver 等人提出联合变换相关识别理论,设计了联合变换相关器(Joint
Transfrom Correlator,JTC)[4]。以上理论的提出,奠定了光学图像模式识别技术的基础,
开创了光学模式识别这一广阔的研究领域。
相比 JTC 型相关器,基于匹配滤波技术的 VLC 型相关器具有定位准确、输出信噪
比高、并行处理等优点,因此 VLC 型的光学相关器更受研究者的重视。最初的光学相
关器,以胶片和全息图作为匹配滤波器的载体,实时性和灵活性差,大大限制了相关器
在实际中的应用。随着现代电子技术、计算机技术的飞速发展,特别是各种空间光调制
器(Spatial Light Modulator,SLM)及电耦合器件(Charge Coupled Device,CCD)的
研制成功和应用,大大推动了光学相关器的发展。用 SLM 作为输入图像和匹配滤波器
的载体,可以实现输入图像和匹配滤波器的实时加载;CCD 作为探测器,可以实时探
测相关输出结果。从此,基于光电混合的实时相关识别技术成为光学相关器发展的主流
方向。光电混合相关器兼具光学高速、并行处理、抗电磁干扰等特点,同时还具有电子
计算机处理的灵活性、精确性、可编程性,能够很好的协调解决图像处理中速度与精度
的问题。因此,光电混合相关器在图像资料处理[5]、工业检测、字符识别、机器视觉、
生物特征识别、导弹制导与目标跟踪具有广泛的应用[6~9]。




