





















三轮 NTV 倾斜转向结构设计
车辆在转弯过程中,会受到由竖直向下的重力和水平向外的离心力的合力构
成的转向力。在过弯速度较快的情况下,传统车辆常会出现转向不足的现象。NTV
车辆利用车身倾斜的方式,使车身与转向力矢量方向保持一致,以此可保证车辆
过弯行驶时的稳定性和安全性。
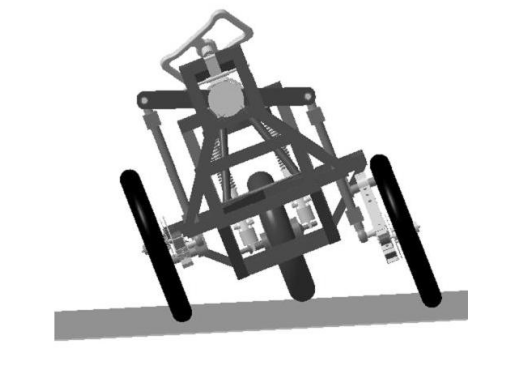
结合总布置设计要求,本文设计了前轮倾斜和后轮转向结构模型,阐述倾斜
转向原理。同时也通过 CATIA 建立了数字模型,利用 CATIA DMU 模块对倾斜结构
模型进行运动仿真。拟通过步进电机实现后轮转向,设计了步进电机的控制及相
关程序。
本文是对三轮 NTV 车辆倾斜转向结构的设计研究,所采用的设计方法和分析
结果对后续的设计与优化提供一定的参考和依据。
关键词 倾斜转向结构 数字化模型 仿真 步进电机 单片机
目 次
1 引言 1
1.1 三轮 NTV 倾斜转向 1
1.2 后轮主动转向的实现 1
1.3 车身倾斜的实现 2
1.4 课题的研究目的与意义 3
2 三轮 NTV 倾斜结构方案设计 4
2.1 摇摆式倾斜结构设计 4
2.2 行星轮式倾斜结构设计 6
2.3 倾斜结构的比较与分析 11
3 运动仿真 12
3.1 倾斜结构部件建模 12
3.2 倾斜结构数模装配 12
3.3 倾斜运动结构分析 13
3.4 倾斜结构仿真的建立 13
3.5 倾斜运动结构的仿真 17
4 三轮 NTV 后轮转向结构设计 22
4.1 转向系统概述 22
4.2 三轮 NTV 后轮转向特性 23
4.3 三轮 NTV 后轮转向 24
4.4 后轮转向步进电机控制设计 26
结论 31
致谢 32
参考文献 33
本科毕业设计说明书(论文) 第 1 页 共 34 页
1引言
传统转向机构的车辆在转弯过程中往往存在因过弯速度较高而造成转向不足[1]的
情况,从而导致车辆侧翻[2]。为避免这种情况的发生,不得不在过弯前采取制动,但
这样势必会造成油耗的增加。近年来,欧洲和日本提出了 Narrow Vehicle 的概念,在
此基础上,有研究机构引进了两轮车辆转向时倾斜的特性,这类车辆被称之为 Narrow
Titling Vehicle,简称 NTV。此课题旨在实现三轮 NTV 的倾斜转向。
1.1 三轮 NTV 倾斜转向
在转弯过程中,车辆会受到由竖直向下的重力和水平向外的离心力的合力构成的
转向力。NTV 车辆用倾斜的方式使转向力矢量方向与车体保持一致,以此来保证弯道
性能和稳定性。
常见的没有并排轮毂的摩托车,即可视作为二轮 NTV。它在过弯的时候不会发生
侧翻,其原因在于车身侧倾了一定角度,使重力的分力与转向力相平衡由此能够保持
平衡。对于三轮 NTV,英国巴斯大学正在研发一种用于控制三轮车车身倾斜的控制器
[3]。2013 年日内瓦车展上,丰田汽车展示了一款名为 i-ROAD 的智能三轮电动车,与
巴斯大学开发的三轮 NTV 不同的是,它是倒三轮车。i-ROAD 具有一个控制装置,可
通告对转向角度以及陀螺仪和车速信号的分析,计算出所要倾斜的角度,让两个前轮
自动上下移动,利用倾斜角度抵消转弯时产生的离心力,以此达到与普通汽车不相上
下的稳定性和更高的弯道性能。
传统四轮汽车转向机构依靠驾驶员操纵转向操纵机构,经转向器和转向传动机构
使转向轮偏转[4]。而要实现三轮 NTV 倾斜转向,则需考虑车身倾斜和后轮转向的操纵
要求。
1.2 后轮主动转向的实现
本课题研究的三轮 NTV 的前后轮主要采用前二后一的布置形式,两前轮及前悬结
构用以实现车身的主动倾斜。如若将转向机构仍放在前轮,势必会增加设计难度,结
构可靠性也难以保证,故而决定采用后轮主动转向。此外,后轮主动的转向不仅可以
实现车辆原地转向,而且能够对转向角进行调整,与当前车速相匹配,减小轮胎的磨
损和行驶阻力。
转向力从驾驶员传到后轮这一过程,如果采用机械传动,必然会有传动效率低、
本科毕业设计说明书(论文) 第 2 页 共 34 页
操纵稳定性不好等缺陷。随着计算机控制技术的进步,电控转向技术的开发与应用正在成为现代汽车技术发展的重要方向[5]。在欧洲,Daimler-Chrysler,Fiat,Ford Europe 和 Volvo 等汽车公司、 Bosch 等零部件厂商和 Chalmers,Vienna 等大学联合开展
Brite-EuRam "X-by-wire”计划[6],对电控转向系统的实现、安全性和可靠性方面进行了
研究。
电控转向系统通过电子控制技术操纵车辆转向。驾驶员操纵转向盘(或操纵手柄)
的动作,被电子装置所感侧,转换成电子信号,传送给以转向电机为执行元件的控制
系统,由微机根据输入信号进行运算处理,确定力矩大小和方向,实现车轮的转向[7]。
相应的转向反馈力(路感)也可由电控系统实时给出。江苏大学罗石等[8]对线控转向
系统的转向盘力回馈模型进行研究,提出了采用测量转向盘的转角和车速直接计算回
正力矩的控制模型,并通过对模型的仿真和试验。提高了响应速度和系统的可靠性,
结构简单,容易获得较好的频响特性。
鉴于电控转向操纵系统布置灵活,并具有利于提高碰撞安全性、操纵轻便性和稳
定性等优点,三轮 NTV 车辆欲实现后轮主动转向这一要求,可采用电控系统进行后
轮的转向操纵。
1.3 车身倾斜的实现
随着社会的发展和科学技术的进步,汽车工业高速发展,车辆的行驶速度处于不
断升高的趋势,车辆的侧翻事故时常出现,汽车的侧倾稳定性受到人们的重视和关注
[9]。
在横向加速度的作用下,车身必然要产生侧倾的趋势,这既会影响乘坐舒适性,
又不利于安全运载[10]。车身可倾斜车辆充分考虑了这一点,在过弯时通过实现车身主
动的倾斜以降低整车的重心高度,从而提升整车的抗翻能力。
目前常见的可倾斜式三轮机车可以分为三大类:
a) 前一轮转向,仅前轮随车身侧倾(1Front1Tilting,1F1T)
b) 前一轮转向,三轮皆可随车身侧倾(1Front3Tilting,1F3T)
c) 前两轮转向,三轮皆可随车身倾斜(2Front3Tilting,2F3T)[11]。
对于 1F1T 车型,荷兰 Carver Europe 在 2009 年就开始出售可自动侧倾的三轮汽
车 Carver One[12-13],其搭载独有的动态车辆控制技术,通过方向盘的转角输入,车身
即可产生最佳的侧倾角度,对于驾驶者的操控心情能够感到自然和愉悦。Transit
Innovations 公司设计的 Project 32 Slalom 就是一辆典型的 1F3T 车型,它专有的自倾
本科毕业设计说明书(论文) 第 3 页 共 34 页
覆悬架系统,使它能够想摩托车一样倾斜并曲线转弯[14]。2002 年 J.Gohl[15]等人以 2F3T
型式的三轮车辆建立其模型,并比较 Direct Tilt Control 方法与 Steering Tilt Control 方
法,控制车身侧倾角。
1.4 课题的研究目的与意义
本课题是三轮 NTV 设计中的倾斜转向结构部分,针对传统转向机构的车辆在转
弯过程中存在因过弯速度较高而造成转向不足,为避免车辆侧翻,在过弯前必须制动,
从而增加能量的损耗这个弊端,探索三轮 NTV 车型转向结构设计的理论方法。
车辆行驶的节能与安全是当前重要课题之一,这项工作有着重要的社会意义。本
设计用于三轮 NTV 设计制造的改进研究。
参 考 文 献
[1]余志生.汽车理论[M].北京:机械工业出版社,2000.
[2]于丛赫,王凌,孙策,张宇.可倾斜式车辆转向机构的设计[J].传动技术,2013,09:30-35.
[3]J. Berote. Development of a Tilt Control Methodfor a Narrow Track Three Wheeled Vehicle [D].Bath:University of Bath, 2011.
[4]陈家瑞.汽车构造[M].北京:人民交通出版社,2003.
[5]陈辛波,王伟,李良华,卓桂荣.双横臂悬架-万向节传动线控独立转向机构[J].同济大学学报(自然科学版),2007,03:390-393.
[6]"X-By-Wire Safety Related Fault Tolerant Systems in Vehicle Project" No : BE 95/1329 Contract No : BRPR-CT95-0032
[7]胡培俊.电动助力转向电机的运用[J].汽车电器,2014,02:042-044.
[8]罗石,商高高,苏清祖.线控转向系统转向盘力回馈控制模型的研究[J].汽车工程,2006,10.
[9]陈辛波,梁栋,武晓俊,黄露.线控独立转向悬架导向机构的设计与分析[J].同济大学学报(自然科学版),2014,42(10):1567-1570.
[10]王志强.电动汽车运动控制研究[D].天津:河北工业大学,2013.
[11]Tilting Three Wheelers [EB/OL].[2017-03-22] http://www.maxmatic.bysj1.com/ttw_index.htm
[12]Carver One MOTOCROSS web [EB/OL].[2017-03-21] http://motocrossactionmag.bysj1.com/news/weird-stuff-what-was-the-carver-one-is-now -the-persus-but-that-still-doesnt-explain-whether-it-Is-a-car-that-leans-or-a-bike-with-a-roof
[13]Carver One Cars News Blog web [EB/OL].[2017-03-17] http://newartcars.bysj1.com/gallery/2488220-carver-one.html
[14]董颖.Proieet32 Slalom 自倾覆三轮车简介[J].摩托车技术,2009,11:068-070.
[15]C. Aniono,R. Angiono,M. Falchi and G. Zolfini, A-TRIX:A Three-Wheels Electric Scooter with Innovative Tilting Mechanism[C].SAE 2007 Word Congress, Detroit, Michigan, April 16-19,2007.
[16]孙桓,陈作模,葛文杰.机械原理[M].第七版,北京:高等教育出版社,2006.
[17]刘宏新,贾儒.CATIA 数字样机运动仿真技术[M].北京:机械工业出版社,2016.
[18]刘光剑. CATIA 运动仿真在车辆转向系统的运用[J]. CAD/CAM 与制造业信息化, 2012, 11 : 46-47.
[19]谭本忠. 汽车转向系统设计技术[M]. 北京: 机械工业出版社,2010.
[20]郑胜敏.微型倒三轮电动车转向系统设计及其 ADAMS 仿真[D].武汉:武汉
本科毕业设计说明书(论文) 第 34 页 共 34 页
理工大学,2008.
[21]杨和平,周旋,童军.步进电机的特点及应用[J].黑龙江科技信息,10.
[22]坂本正文.步进电机应用技术[M].北京:科学出版社,2010.18-35.
[23]令朝霞.基于单片机的遥控步进电机控制的设计[J].自动化技术与应用,
2012,31(4):78-80.
[24] 黄佳君,项辉宇,刘倩倩,孙超.基于 STC89C52单片机的可控旋转视觉试验台的设计[J].机电产品开发与创新,2014,27(3):121-124.
[25]李白涛,王磊,丁亚雪.基于 STC 单片机的步进电机控制系统设计[J].信息通信,2014,7:59-60.
[26]熊超美.步进电机的单片机控制硬件系统设计[J].湖南有色金属,2011,27
(2):60-64.
[27]杨传雷,王银燕,杜建维,等.步进电机在柴油机 VGT 控制中的应用[J].应用科技,2007,34(2):52-54.
[28]曹立军,陈璐,王子豪.机械手在制药生产线上的应用[J].自动化控制与装备,
2014,29:31-36.



