





















基于ANSYS压铸产品取件机器人结构设计及有限元强度分析
摘 要
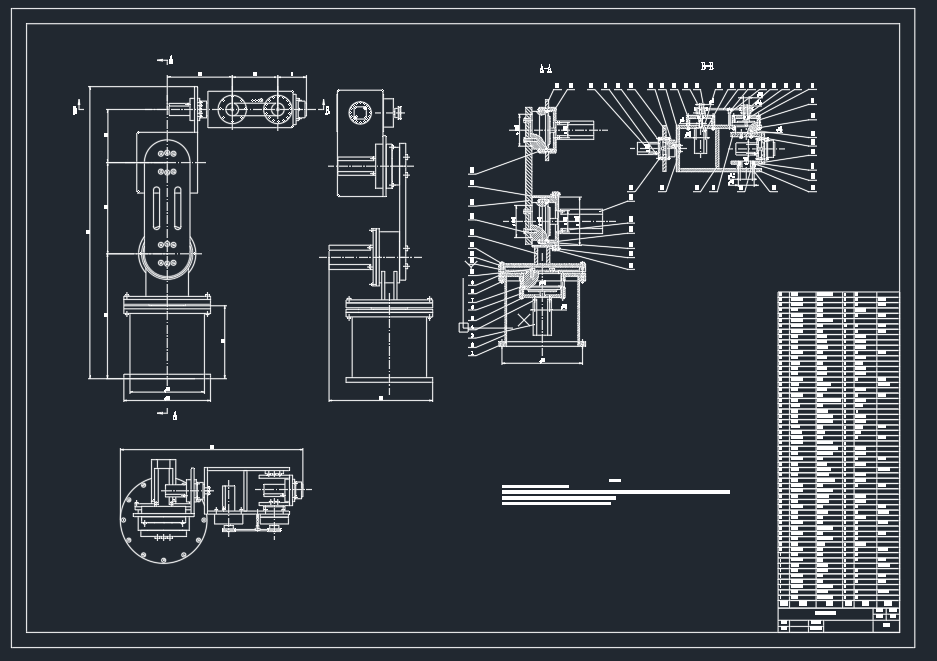
由于压铸车间环境恶劣,对工人身体健康危害极大,因此压铸生产中取件动作通常是由取件机器人完成的。但是传统取件机器人多为三自由度机械手,功能单一,对不同零件的适应能力较差,无法满足多种零件生产的需求。基于此本文借助三维设计软件及有限元分析软件,设计并分析了一台用于压铸车间自动取件的关节式六轴工业机器人。
本文所做主要工作为六轴机器人的结构设计及关键部件的强度校核。通过查阅资料以及根据实际工作需要,确定了该机器人的性能参数和初步设计方案。通过设计计算,选定合适的伺服电机和减速器。通过仿真和强度计算,设计出各个零部件模型,并与伺服电机和减速器模型进行整体装配,实现了运动仿真。
将机器人腰部关节与大臂模型导入ANSYS软件,对这两个关键部件进行静力校核以分析其强度及变形情况,并根据分析结果对杆件进行优化。在此基础上,运用D-H参数法建立了六轴工业机器人的数学模型,推导了运动学正、反解的方程,并在Matlab中对方程进行了求解,为将来进行轨迹规划奠定理论基础。通过对压铸产品取件机器人进行仿真建模及分析,结果表明机械性能基本满足设计要求。
关键字:工业机器人、结构设计、ANSYS分析、运动学仿真
Abstract
Because of the terrible environment of the Die Casting Workshop, the pickup action of the casting production is usually done by the pickup robot. But the traditional robot with three degrees of freedom has poor ability to adapt to pick up different castings unable to meet the needs of a variety of parts production. So with the help of computer-aided design and analysis software, a six-axis industrial robot for automatic pick of castings is designed and analyzed.
In this paper, the mechanical system of the robot is designed and the strength of some key components of the six-axis robot are checked. At first, the performance parameters of the robot is determined based on the needs of practical work. Then select the appropriate servo motor and reducer of the robot by calculation. Apart from that, drawing all parts of the industrial robot by means of the SOLIDWORKS software and assembling them into an overall model.
Then using ANSYS software to check the strength of key components. On this basis, using D-H parameter method to build a mathematical model of a six-axis industrial robot and establish the kinematic equation. By modeling and analysis of the industrial robot, the results showed that the mechanical properties can basically meet the design requirements.
Keywords: Industrial robot; Mechanical design; ANSYS analysis; Kinematics
目录
1 绪论 1
1.1 背景及研究意义 1
1.2 工业机器人国内外研究现状 1
1.3 论文主要研究工作和内容 2
1.4 本章小结 3
2 取件机器人设计思路 4
2.1 取件机器人主要参数 4
2.2 取件机器人的传动方案 4
2.3 取件机器人动态静力学建模 5
2.4 取件机器人驱动系统选型计算 6
2.5 本章小结 16
3 取件机器人结构设计 17
3.1 取件机器人整体结构 17
3.2 关节轴5结构形式 18
3.3 其他关节轴的结构形式 18
3.4 驱动电机和减速器选型校核 20
3.5 本章小结 26
4 主要部件设计计算及校核 27
4.1 同步带选型计算 27
4.2 减速器输入轴的设计与计算 28
4.3 SGMJV-01电机接长轴的设计计算 30
4.4 主要螺栓组校核计算 31
4.5 本章小结 35
5 取件机器人关键部件有限元分析及优化 36
5.1 腰部关节和大臂有限元模型的建立 36
5.2 腰部关节和大臂有限元模型网格划分 36
5.3 腰部关节和大臂有限元分析及优化 37
5.4 本章小结 42
6 取件机器人运动学分析 43
6.1 取件机器人D-H参数法建模 43
6.2 压铸产品取件机器人运动学分析 45
6.3 本章小结 50
总结与展望 51
参考文献 52
致谢 54
1绪论
1.1背景及研究意义
工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备[1]。伴随着近年来国内制造业升级的需求及工业自动化的发展,工业机器人在越来越多的领域得到了广泛应用。
压力铸造由于其生产效率高,生产出的产品表面粗糙度好,结构强度大等优点,在我国制造业中应用广泛[2]。但是在压铸生产过程中,会产生诸如有害气体、噪声和热辐射等对生产一线的工人们身体健康造成极大危害的污染物。压铸车间环境如图1-1所示。除此之外,人工取件不仅生产效率低,人工成本高,而且每天数千次的重复动作极易导致工人出现健康问题。
参考文献
[1] 蔡自兴.机器人学[M].清华大学出版社,2000.1-16.
[2] 吕广庶,张远明.工程材料及成形技术基础[M].北京.高等教育出版社,2011.173-175
[3] 毕胜.国内外工业机器人的发展现状[J].机械工程师.2008,7:1-3
[4] 陈佩云,金茂菁,曲忠萍.我国工业机器人发展现状[J].机器人技术与应用.2001,1:2-5
[5]李瑞峰.中国工业机器人产业化发展战略[J].航空制造技术.2010,9:7
[6] 童秉纲,钟宏九,黄文虎.理论力学[M].北京.高等教育出版社,2002.323-330
[7] 孙汉卿,吴海波.多关节机器人原理与维修[M].北京.国防工业出版社,2013.1
[8] 李团结.机器人技术[M].北京.电子工业出版社,2009.39-42
[9] 陈成.六自由度工业机器人设计及仿真分析[D].南京信息工程大学硕士学位论文.4-6
[10] 赵玉刚,宋现春.数控技术[M].北京.机械工业出版社,2003.199-205
[11] 周科.六轴工业机器人设计与轨迹规划方法[D].哈尔滨工业大学深圳研究生院硕士学位论文.15-23
[12] 孔红兵.低载荷工业机器人机械系统的虚拟设计[D].南京信息工程大学硕士学位论文.24-36
[13] 杜永忠,平雪良,徐卫斌.基于ANSYS的工业机器人腰关节结构分析[J].工具技术.2012,46:1-4
[14] 陶智量.基于Matlab的6自由度工业机器人仿真研究[D].吉林大学硕士学位论文.7-17
[15] 陈祝权,梁晓和,林粤科.六自由度串联机器人结构设计及有限元分析优化[J].机床与液压.2013,23:1-4
[16] 扶宇阳.6R工业机器人结构设计及运动轨迹规划仿真研究[D].五邑大学硕士学位论文.16-28
[17] 杨国良.工业机器人动力学仿真及有限元分析[D].华中科技大学硕士学位论文.40-59
[18] 刘思思,张春雷.基于ANSYS的工业机器人大臂的有限元静态分析[J].中国西部科技.2013,9:1-4
[19] 沈陆.六自由度机器人的轨迹规划及仿真研究[D].大连理工大学硕士学位论文.12-20
[20] 李伟.六自由度关节式机器人控制系统开发[D].华东理工大学硕士学位论文.53-63
[21] Wang T, Lei X,Chou W. The development of robot technology in China[M]. IntelligentRobotics and Applications, Springer, 2008, 1-9.
[22]Brogardh T. Present and future robot control development~an industrial perspective[J].Annual Reviews in Control. 2007,31(1):69-79



