





















六轮机器人平台结构设计
摘要
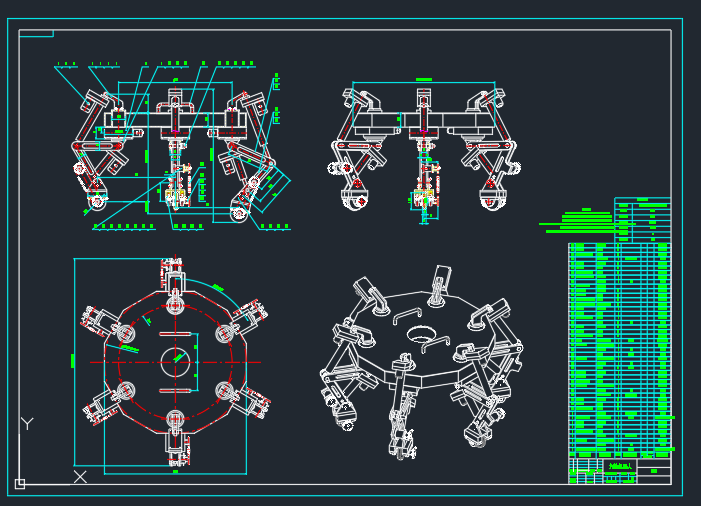
科技技术在不断进步,从而推动着机器人技术也在大步向前发展和快速迭代。机器人运动的灵活性及适应性总是人们在设计开发过程中比较在乎的话题,正如我们所知道的在自然界和人类社会中存在一些人类无法到达的地方和可能危及人类生命的特殊场合,地形不规则和崎岖不平是这些环境的共同特点,这种不规则的不稳定地形在我们地球占据了绝大部分。这种地形是传统轮式运动或是履带传动的机器人无法顺利到达的,而参考多足昆虫,可以灵活地在其中自由活动。因此多足机器人的设计思路也随之诞生,凭借着卓越的环境适应能力,以及极大程度的降低对环境的物理性影响等等,弥补了传统轮式运动或是履带传动的机器人的不足之处。本次毕业设计是关于六轮机器人的设计。首先对六轮机器人作了简单的概述;接着分析了各部分元件、零件的选型原则及计算方法;然后根据这些设计准则与计算选型方法按照给定参数要求进行选型设计;接着对所选择的各主要零部件进行了校核。本次设计由四个主要部件组成:支撑腿升降装置、支撑腿摆动装置、支撑轮转动装置、主体钢结构。进行了仿生甲虫机器人的结构设计,机器人机身采取以轴线对称的八边形设计,其腿部结构是一个三自由度的结构,由三个转动关节组成,即跟关节、髋关节及膝关节,而基节、股节和胫节则绕着三个关节做着单自由度的旋转运动进行设计。
关键词:六轮机器人;选型设计;主要部件;结构设计。
Abstract
With the continuous progress of science and technology, robot technology is also developing rapidly and iteratively. Flexibility and adaptability of robot motion are always the topics that people care about in the process of design and development. As we know, in nature and human society, there are some places that human beings can not reach and special occasions that may endanger human life. Irregular terrain and rugged terrain are the common characteristics of these environments. This kind of irregular and unstable terrain is on our earth. It occupies the vast majority. This kind of terrain can not be reached smoothly by traditional wheeled or caterpillar-driven robots. Reference to multi-legged insects, they can move freely in it. Therefore, the design idea of multi-legged robot was born, with excellent environmental adaptability, and greatly reduce the physical impact on the environment, etc., to make up for the shortcomings of traditional wheeled or caterpillar-driven robots. This graduation project is about the design of six-wheel robot. Firstly, a brief overview of the six-wheeled robot is given. Secondly, the selection principles and calculation methods of components and parts are analyzed. Then, according to these design criteria and calculation methods, the selection design is carried out according to the given parameters. Secondly, the main parts selected are checked. The design consists of four main components: support leg lifting device, support leg swing device, support wheel rotating device and main steel structure. The structure design of the bionic beetle robot is carried out. The body of the robot adopts an octagonal design with symmetrical axes. The leg structure is a three-degree-of-freedom structure consisting of three rotating joints, namely, the heel joint, the hip joint and the knee joint, while the base joint, the thigh joint and the tibia joint rotate around three joints in a single-degree-of-freedom motion.
Key words: six-wheel robot; type selection design; main components; structure design.
目录
摘要 1
Abstract 2
一、前言 5
1.1研究背景 5
1.2国内外研究现状 6
1.3本文主要研究内容 12
二、 六轮机器人设计概述 13
2.1.六轮机器人的工作原理 13
三、 六轮机器人的设计计算 15
3.1 已知原始数据及工作条件 15
3.2 计算步骤 15
3.2.1 外形尺寸的确定: 15
3.3.2 主要阻力计算 16
3.3.3 主要特种阻力计算 17
3.3.4 附加特种阻力计算 17
3.3.5 倾斜阻力计算 18
3.4传动功率计算 18
3.4.1 走行轮功率()计算 18
3.5 传动链张力计算 19
3.6 传动链轮最大扭矩计算 19
3.7 走行轮及轴 20
3.7.1 走行轮的作用及类型 20
3.7.2轴的作用及类型 23
3.7.3轴与轮的配合结构 28
3.8电机的选用 39
3.9减速器的选用 40
3.9.1 传动装置的传动比: 40
3.10制动装置 42
3.10.1制动装置的作用 42
3.11 转向装置 42
结论 45
参考文献 46
一、前言
1.1研究背景
在目前的时代背景下,机器人技术,在技术不断地变革中,作为一个目前正在高速崛起的新型行业,正在经历着飞速的发展。机器人技术由于其多样性,因此可以运用在许多的行业及企业中,其适应性及发展前景可见一斑。在我们的日常生活中,机器人也是慢慢地走入我们的视野,只是我们感觉不明显。其实,我们的已经从最为传统的手工生产转型成为机械生产,其变化之大让人咋舌。同时,机器人技术的程度也是能反应一个国家的经济实力以及军事能力的,也是对外宣扬国家能力的一种重要手段。
机器人技术的发展主要是从上个世纪中叶开始兴起的[1]。伴随着计算机的发展越来越好,同时工业农业自动化技术的普及,也是大大推动了机器人行业的前进步伐,同时也拓展了其涉足的领域。相辅相成,机器人在工业农业中的低位越来越高,人们越来越依赖机器人技术,同时也不断在进行着改进,优化机器人在专业领域的运用程度。
机器人的出现,主要是为了提高效率,减轻人工负担[2]。其发展的目标也始终在这方面进行着很大的努力。在这样的背景下,仿生学,又一种较为新颖的学科诞生了。仿生学,顾名思义,仿照生物的运动能力来进行研究以此优化机器人的机械结构[3]。它不仅涉及生物学,还会牵涉到机械结构设计,传感器技术,物理学等诸多不同的学科。本次研究的多足机器人就是一种典型的仿生学机械结构优化设计。通过模仿昆虫的步行行走模式和过程,机器人轮式和履带式的传统运动结构得以改变,可以像昆虫一样大大拓展机器人的运动范围和适用情景。由此看来,多足仿生机器人的设计对于我们人类生产或是自然探究来说都是具有深远的意义。
在目前的社会环境下,多足机器人已经慢慢步入了我们的视野当中,对多足机器人的关注度也越来越高。相较于其他运动方式的运动机器人,六足机器人由于可以模仿六足昆虫的活动方式,因此也可以想昆虫一样灵活机动地在不同的地形上自由运动。也正是其优越的运动特性,人们也乐于发掘这样的运动机器人的潜力,对其也越发重视。
机器人的机械可靠性验证,如果是靠直接按照设计先加工出实物再进行实验的话,会大大提高开发成本,同时也会延长开发周期,调整不便,修改困难。因此使用计算机仿真技术是一种可行的研究方案。通过生产实物前的计算机模拟来对设计的物品进行评估,再决定如何修改,简单方便。为了实现简单结构下的功能多样化及运动稳定性,本次设计的仿生甲虫机器人拟采用对称结构设计思路,采用低密度高刚度的材料,使得机器人稳定且重量轻,运动灵活,大大提升了机器人的灵活性[4]。
多足步行机器人的运动轨迹是一系列离散的足印运动时只需要离散的点接触地面对环境的破坏程度也较小可以在可能到达的地面上选择最优的支撑点对崎岖地形的适应性强。正因为如此多足步行机器人对环境的破坏程度也较小。轮式和履带式机器人的则是一条条连续的辙迹。崎岖地形中往往含有岩石、泥土、沙子甚至峭壁和陡坡等障碍物可以稳定支撑机器人的连续路径十分有限,这意味着轮式和履带式机器人在这种地形中已经不适用。多足步行机器人的腿部具有多个自由度使运动的灵活性大大增强。它可以通过调节腿的长度保持身体水平也可以通过调节腿的伸展程度调整重心的位置因此不易翻倒稳定性更高。当然多足步行机器人也存在一些不足之处。比如为使腿部协调稳定运动从机械结构设计到控制系统算法都比较复杂相比自然界的节肢动物仿生多足步行机器人的机动性还有很大差距。
1.2国内外研究现状
多足机器人是一种模仿多足动物肢体结构的一种运动机器人,有着冗余驱动、比较多的支链结构、时变拓扑的的运动结构[7]。多足,一般指的是四足及以上的足数结构。目前发展下,四足机器人是比较常见的多足机器人,在这其中,又以四足步行机器人较多[8]。在更多足数的情况下也是类似,步行的运动结构比较多见。在二十世纪八十年代,多足机器人先驱者,美国著名机器人研究者R.B.McGhee,开始着手研究四足步行机器人[9]。从当时至今,多足机器人的步态理论研究始终还是个难点,多足机器人的机械部分开发可能远远领先于步态理论研究,如今还有许多专家学者专门从事相关的研究。
我国其实在很早以前就有类似的多足仿生机器人的研究,仿生对象为牛和马。没错,就是在三国时期出现的神秘的“木牛流马”。而在国外,有记载的最早设计的多足放声机器人是1893年Rygg研究制造的马型机器人[10]。经过了几百年的研究,人类在这方面的研究也取得了巨大的进步。总结归纳,人类对于这类机器人共经过了一下几个阶段:
(1)第一阶段:
第一阶段的机器人基本是通过机械原理以及液压原件来实现机器人的运动。在二十世纪六十年代,美国科学家就通过凸轮连杆机构设计出了多足步行机器人,其灵活性比当时的轮式或是履带式传动的机器人更为灵活机动。如图1.1所示,四足步行机器人时候液压马达系统来作为动力,通过驾驶员身上的传感器来检测姿态。整个机器人非常巨大,且操作困难。但是其意义巨大,通过四组系统实现了步行以及攀爬等功能,是人类多足机器人史上的一坐里程碑。虽然实现了一定的功能,但是其主要操控者还是通过人来实现,因此在步态算法方面其实贡献有限,主要突破在于机械结构方面。
计,使各部分的功能达到最优。
参考文献
[1] 机械工程手册、电机工程手册编辑委员会.机械工程手册—机械产品(二)[M].机械工业出版社.1982年8月.
[2] 范祖尧等.现代机械设备设计手册—非标准机械设备设计[M].机械工业出版社.2000年6月.
[3] 唐金松.简明机械设计手册(第二版)[M].上海科学技术出版社.2002年6月.
[4] 北京起重机机械研究所、武汉丰凡科技开发有限责任公司.DTⅡ(A)型六轮机器人机械设计手册[M].冶金工业出版社.2003年8月.
[5] 机械工业部设计单位联合设计组.ZJT1A-96六轮机器人设计选用手册[M].黄河水利出版社.1998年10月.
[6] 机械化运输设计手册编委会.机械化运输设计手册[M].机械工业出版社.1997年5月.
[7] 张钺.新型六轮机器人设计手册[M].冶金工业出版社.2001年2月.
[8]《运输机械设计选用手册》编组委.运输机械设计选用手册(上、下)[M].化学工业出版社.1999年1月.
[9] 毋虎城.矿山运输与提升设备[M].煤炭工业出版设.2004年5月.
[10] 上海煤矿机械研究所.煤矿机械设计手册[M].1972年.
[11] 于学谦.矿山运输机械[M].中国矿业大学出版社,1998年.
[12] 北起所.DTⅡ型六轮机器人设计选用手册[M].冶金工业出版社.1994年.
[13] 北起所.DTⅡ型六轮机器人平行轴驱动装置设计选用手册[M].机械工业部.1997年.
[14] 孔庆华,刘传绍.极限测量与测试技术基础[M].同济大学出版社.2002年.
[15] 机械设计手册编写组.机械设计手册[M].化学工业出版社.2002年.
[16] 中国纺织大学工程图学教研室.画法几何及工程制图[M].上海科技出版社.2000年.
[17] 张文芳,段志强,边会杰.六轮机器人防跑偏辊及清扫器的使用与研究[J]. 河北煤炭.2002,5:9-10.
[18] 尹万涛,胡述记,米迎春.六轮机器人自动调偏装置的改进设计[J].郑煤科技.2005,3:42-44.
[19] 李红玉.六轮机器人自动调偏滚筒.矿业快报.2004,4(4):36.
[20] 张广文.起井下胶带输送机火灾事故的剖析与经验教[J].煤矿安全,2001,32(10):46-47.
[21] 李铁东,姜卫东.西沟矿下运六轮机器人系统的设计及应用[J].煤矿机械,2004(9):8-9.
[22] 刘训涛,毛君.六轮机器人断带抓捕器研究[J].矿山机械,2005(2):41-42.
[23]毛君,刘训涛.六轮机器人断带保护系统的研究[J].煤矿机械,2004,(11):99-100.
[24] 陈炳耀,祁开阳.六轮机器人输送带与滚筒之间的打滑分析[J].煤矿机械,2003(5):49-51.
[25] 罗云.21世纪安全管理科学展望[J].中国安全科学学报,2000,10(1):27-31.
[26] 禹金云.机械安全技术趋向分析[J].中国安全科学学报,2004,14(4):54-56.
[27] 王传海,张卫国.六轮机器人断带及飞车制动保护装置[J].矿业安全与环保2003,30(3):40-46.
[28] 史志远,朱真才.六轮机器人断带保护装置分析[J].煤矿机械,2005(8):83-85.



