



浅谈科技航海的发展趋势——雷达定位与导航研究
【摘要】 雷达作为一无线电的导航和定位系统,经过了接近一个世纪的发展,在现代的人类社会中得到了广泛的应用。航海雷达作为一种重要的船舶导航设备,随着科学技术的发展,其功能不断完善。它与计算机技术相结合,具有自动处理信息的功能,可以自动、迅速准确地完成测量、显示、控制,在保障船舶航行安全,加快营运周期,减轻航海人员的劳动强度发挥越来越大的作用,是船舶必备的主要导航设备。本文通过航海实际观测、记录使用不同的雷达定位方法进行定位的数据,分析其精度状况及影响精度的因素;论述提高定位精度方法的可能性。通过此研究工作,分析雷达的定位与导航应用、各种定位方法及影响精度的诸因素,为正确使用雷达提供参考。
【关键词】 雷达 ;定位 ;距离 ;方位;精度
The Analysis on Various Positioning Precision of Radar
[Abstract] Radar of the ship as an important navigational aids, and its function from the initial target identification to target the development of modern radar is not only a superior expansion of people's senses of sensors, which are related to computers, automatic control technology, etc. with automatic processing of information, automatically, quickly and accurately complete the measurement, display, control, to some extent, substitute for human thinking and work, in the national economy, scientific research to play an increasing role. The role of marine radar is to protect the safety of navigation of ships, speed up the operating cycle, reduce the labor intensity of mariners, the ship must have the primary navigation equipment. Through observation, the radar records of the use of different methods of positioning data to analyze the accuracy of the situation and the factors that affect the accuracy; discussed ways to improve positioning accuracy. The purpose of this study is to better understand the various positioning methods and radar positioning accuracy of the impact of various factors, to master the use of various positioning methods and measures to improve its accuracy.
[Key words] Radar; Positioning ;Distance; Azimuth;Precision
0引言 1
1 雷达的组成及基本原理 1
1.1 雷达基本组成及各部分作用 1
1.2. 雷达测距测向原理 3
1.3 航海雷达发展的方向 4
2 雷达使用与航行安全 4
2.1 船用雷达的使用常识 5
2.2 船用雷达物标识别及其局限性 7
3 船用雷达定位 8
3.1 雷达回波识别与方位、距离的测定 8
3.1.1 雷达回波识别辨认 9
3.1.2 物标方位测定 9
3.1.3 用雷达观测物标的距离 10
3.2 方位定位 11
3.2.1 两方位定位 11
3.2.2 三方位定位 11
3.2.3 雷达方位误差的调整方法 11
3.3 距离定位 12
3.3.1 定位方法 12
3.3.2 距离定位船位误差 12
3.3.3 提高物标距离定位精度方法 13
3.4 方位距离定位 13
4 雷达在船舶导航中的应用 13
4.1 雷达导航方法 14
4.11 距离避险线法 14
4.12 雷达方位避险法 14
4.13 雷达连续定位法 15
4.2 雷达导航注意事项 15
4.3 雷达在长江雾航中的应用 16
5 雷达定位精度实例分析 17
5.1雷达定位实测数据 17
5.2 雷达定位分析 21
5.2.1 雷达目标的影响 21
5.2.2 不同定位方法的精度比较 21
结论 22
致谢语 23
参考文献 24
0引言
雷达作为一无线电的导航和定位系统,经过了接近一个世纪的发展,在现代的人类社会中得到了较为广泛的应用。雷达的优点是白天黑夜均能探测远距离的目标,且不受雾、云和雨的阻挡,具有全天候探测目标的特点。因此,它不仅成为军事上必不可少的电子装备,而且广泛应用于社会经济发展(如气象预报、资源探测、环境监测等)和科学研究(天体研究、大气物理、电离层结构研究等)。星载和机载合成孔径雷达已经成为当今遥感中十分重要的传感器。
航海雷达已问世50余年了,它作为一种船舶必备仪器,对保证航行安全的重要性和优越性已无庸置疑。但根据有关方面的调查表明,由于船舶驾驶员对船用雷达的使用性能及其局限性缺乏全面的了解,因而在航行中未能充分发挥雷达的潜力,或者错误理解雷达图像信息,从而导致船舶碰撞和其它海事的不幸事故时有发生。本文通过在航海实践中,使用雷达的实例及观测的数据,针对航海雷达在使用过程中所出现的问题加以分析,以期进一步了解雷达的海上导航定位精度,真正发挥航海雷达在航海安全中的作用。
1 雷达的组成及基本原理
1.1 雷达基本组成及各部分作用
航海雷达是一种自主式导航仪器,通过发射机以脉冲方式发射电磁波,电磁波在空中传播,碰到物标产生回波,并被雷达天线接收,接收的电磁波经接收机处理,送到显示器显示。它由收发机、显示器、天线系统、电源设备等组成,如图1-1所示。收发机一般包括触发电路、发射机、接收机、收发开关等几部分组成。
图1-1 航用雷达组成框图
触发电路,又称触发脉冲发生器、定时器或定时电路等。其任务是每隔一定时间产生一个作用时间很短的尖脉冲,分别发送到发射机、接收机、显示器,使它们同步工作。
发射机,由一个调制器和磁控管振荡器组成,其任务是产生一定宽度(0.05-2μs)的大功率超高频(3-75kw)的脉冲信号,即发射脉冲(或称射频脉冲)。射频脉冲经波导馈线送入天线,向外发射。
天线系统,由一个发射/接收天线、天线旋转设备和波导管组成,其作用是发射超高频电波,接收从物标反射回来的超高频回波,并将方位信号和船首信号传输至显示器。
收发开关,在发射时自动关闭接收机入口,让大功率发射脉冲只送到天线向外辐射而不进入接收机,以防止它损坏接收机;而在发射结束时,又能自动接通接收机通路让微弱的回波信号顺利进入接收机,同时关断发射机通路,以防止回波信号能量的流失。
接收机,把回波信号先进行变频--变成中频回波信号,然后再放大、检波、再放大,变成显示器可以显示的视频回波信号。
显示器,在触发脉冲的控制下产生一个锯齿电流,在屏上形成一条径向亮线,用来计时、计算物标回波的距离,同时,扫描线由方位扫描系统带动,随天线同步旋转,这样,显示屏上可以同步的计时、计算和显示物标方位距离。
电源设备,雷达电源设备的作用是把各种船电变换成雷达所需要的具有一定频率、功率和电压的专用电源。
1.2. 雷达测距测向原理
航海雷达测距原理与日常生活中用回声方法估测山崖的距离相似。不同的是,雷达发出的不是声波而是超高频无线电波;计时的工具不是秒表而是显示器计时电路。因为超高频无线电波在空间传播时具有等速、直线传播的物理特性,并且遇到物标之后有良好的反射特性,所以,只要测得无线电波往返于雷达天线与物标之间的时间△t,就可求出物标离船舶雷达天线的距离s:
S=C(t2-t1)/2 =C×Δt/2
式中:C:电波在空间传播的速度(C=300m/μs)
Δt:电波在天线与物标之间往返传播的时间
雷达测向原理是通过天线的方向性来实现的。由于超高频无线电波的传播特点:直线传播及遇到物体有良好的反射特性;把天线做成定向天线,即只向一个方向发射,也只接收这个方向返回的电波(回波)。
图1-2 雷达测方位原理
当天线旋转时,在某个方向收到回波时,天线所指的方向就是物体的方向。而雷达在使用过程中,通过方位扫描系统随时把天线相对于船首的方位送到显示器。显示器在荧光屏上直接把回波显示在它相对于船首的方位上,从而实现了雷达的测向功能。
1.3 航海雷达的发展
航海雷达自第二次世界大战使用以来,其基本结构并无很大的改变,磁控管发射机、高灵敏度接收机、双工器、天线和显示器的工作原理均与以前的相同,但性能和可靠性已经得到改进。应用固态电子技术,使设备的可靠性有了很大的提高。现代航海雷达除磁控管和阴极射线管以外,其他有源电路元件基本上已全部使用晶体管和集成电路。由于电路改进,脉冲宽度已从1~2微秒减至0.1微秒,磁控管峰值功率已从3千瓦提高到50千瓦,从而目标分辨力和灵敏度得到提高。开槽波导天线阵列使天线波束宽度从2°减至 0.7°或0.8°,使目标方位辨别能力得到提高。利用计算机技术,研制成功自动雷达目标跟踪和估算系统,它能处理雷达视频电压,检测和跟踪目标,测量船舶与目标之间的相对运动,预计目标未来的运动态势和最近会遇距离,协助驾驶人员采取避让行动。航海雷达和自动雷达标绘装置是船舶的重要设备,在航海安全保障中发挥重要作用。
2 雷达使用与航行安全
作为船舶驾驶员,必须掌握船用雷达的各项使用性能及影响这些使用性能的各种因素,才能充分发挥雷达的潜力。了解其局限性,从而正确理解和使用雷达图像信息,以保证船舶航行安全。
2.1 航海雷达的使用常识
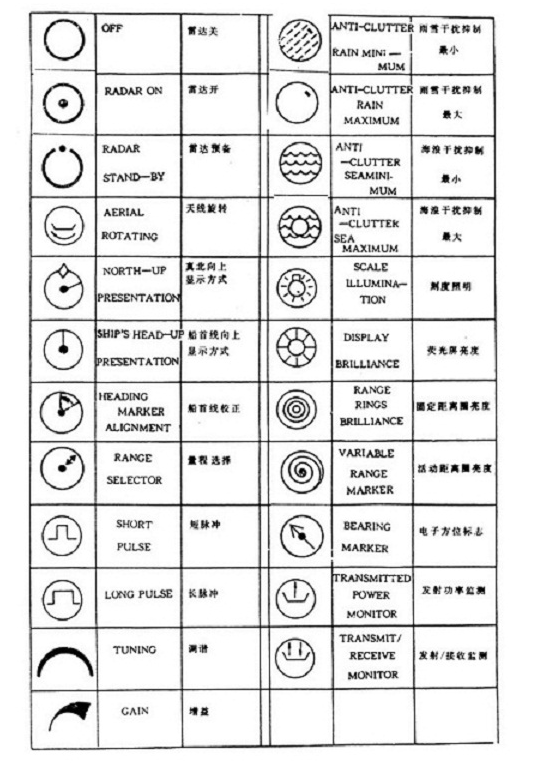
航用雷达在日常使用中有着规范的步骤和方法,图2-1为航海雷达的主要控钮及其作用。这些控钮的正确使用将使雷达性能得到正常发挥。
图2-1 航用雷达各控钮及其意义
雷达开机前的准备:
1)检查天线平台上有没有人或障碍物
2)检查发射开关是否在关,扫描亮度是否在最小,增益、STC及其它杂波抑制控钮是否在最小
3)低温潮湿天气,应先加温去潮
雷达的开机步骤:
1)合船电闸刀
2)接通雷达电源开关(放预备)
3)接通天线电源
4)调扫描亮度而后调增益
5)3分钟后,雷达开关放工作(发射)
6)调谐
7)视情况调杂波抑制控钮到合适的位置,从而使雷达回波图像饱满清晰。
雷达关机步骤:
1)将雷达开关放预备
2)将扫描亮度关小、增益、STC等杂波抑制钮关小
3)关天线
4)关雷达电源(放OFF)
5)拉船电闸刀
雷达安装后的验收:
1)按操作步骤检查、开机
2)通电后,检查机内有无异味、打火、异常声响,并查电源输出是否符合要求。
3)开天线,天线应按顺时针方向以额定转速匀速旋转
4)增大扫描亮度,应见扫描线按顺时针方向以额定转速匀速旋转。
5)增大固定距标圈亮度,应可见六个等间隔固定距标圈,最外圈离屏边缘2--3mm。
6)增大增益,屏上应见噪声斑点。
7)开发射后,调谐钮调在中间位置附近应有最好的回波。
8)应无距离及方位误差
9)测定阴影扇形、最小作用距离。并将上述各项如实记入雷达日志。
10)安装完工,船方验收合格后,应在安装工程报告上签字。并按要求填写雷达安装证书,以启用保修期。
2.2 船用雷达物标识别及其局限性
雷达回波存在各种各样的假回波和杂波,一般应该结合对船舶周围的环境实际的瞭望和对雷达图像的综合分析,理论联系实际,积极思考、观察和比较,准备和迅速的作出正确的判断哪些是假回波,那些是杂波而那些则是有用的雷达回波。
雷达假回波有:间接反射假回波、多次反射假回波、旁瓣回波、二次扫描回波;
雷达干扰杂波有:海浪干扰杂波、雨雪干扰杂波、同频雷达干扰、电火花干扰、扇形干扰等。还应注意雷达扇形阴影区,一般阴影区的行程是由于本船烟囱或者船上高达建筑物遮挡了雷达的扫描回波,从而在雷达图像上本船的尾部一定扇形区域内行程了一个没有任何回波的区域,处在这个区域中较为接近本船和净空高度比较低的船舶在雷达图像上没有任何回波。作为一名合格的驾驶员,应该十分清楚上述杂波、假回波一级雷达扇形阴影区生成的原因并能够准确的识别这些干扰的回波和雷达阴影区域,并且结合谨慎安全的瞭望经过认真的分析,这样才能准确的分析出雷达图像所传递给我们值班驾驶员的信息。
关于雷达杂波的识别,在雷达观测中是十分重要的。在观测雷达回波的五次扫描中,如果雷达回波有三次或者三次以上比较稳定的出现在合理的位置,就要十分警惕,并结合望远镜或者肉眼在相应的方位上认真瞭望,当夜间可能是没有点灯的小船或者是能见度不良的水域或者是风浪较大雷达杂波较多时,应该反复的观测三个五次雷达波判断其回波是否继续出现以上情形,用以确定是否为物标回波或是杂波,如果有怀疑,应该假设其船舶的存在,并采取相应的行动。在长江航行时,由于其小船渔船较多,船舶密度较大,更应该重视正确识别雷达回波,并应谨慎重复多次观测,做出分析判断。
物标在雷达上的回波的大小和强弱受物标的质料、高度、形状和本船的相对位置的影响。钢铁制、净高空、棱角分明并与本船航向相对垂直的船舶其回波最为明显。当船舶航行在长江流域的不发达水域时(比如:安徽太子矶、黄石水域、三峡以及渔船稠密的水域),一定要注意这些水域在有许多木制的小蜘蛛渔船,因其材质反射能力较弱,应该保持高度的警戒和严谨的瞭望,并在雷达上选取合适的显示方式以确保航行安全。
同时雷达测量物标存在方位误差、距离误差。由于方位误差更大,所以雷达测出的距离往往会比较精确,因此距离定位就比方位定位准确。受雷达距离分辨率和方位分辨率的影响,两个较近的物标在雷达图像只显示一个回波点,所以一定要注意,否则在雷达上观测以为已经让过一条船,没注意在其后紧跟着一条船,没有预计到与其会遇状态,这紧跟在其后的船舶如果采取与本船不协调的避让措施,则很可能因为双方的不协调行动导致碰撞。
综上所述,由于雷达的局限性,船舶在航行时不可完全依赖雷达,在开启雷达的同时还必须进行暸望,以确保船舶在长江水域的安全航行。
3 船用雷达定位
雷达定位就是用雷达测出物标的距离和方位,然后通过海图作业求出本船的船位。要获得准确的船位,必须目标认得准、选的合适;测量方法精确;测量数据准确;测量速度快。要研究船位附近海图资料,了解各种物标的特点(高度、地形、地貌、视角及传播途径的状况,结合雷达的性能及当时的气象、海况,船舶状态,分析物标可能的变形,找出特点明显、不易混淆的物标作基准,然后,再以它们的相对位置关系逐一假意辨认。因此,缺少位置确切可靠的目标,草率选择目标并用于定位和导航时非常危险的。
3.1 雷达回波识别与方位、距离的测定
在长江水域进行船舶引航时,由于不同质料的物体有不同的回波效应,因此值班驾驶员应该能够熟练了解几种简单的雷达目标诸如浮标、船舶、建筑物、岸线、悬崖陡岸、洲滩、过江电缆、江中桥梁等的回波特性。回波的识别及目标辨认的快慢以及译解能力不是从文章中或听别人讲解就可以提高的,而是要在实践中不断总结、积累经验得到的 。因此应该利用一切时机,包括天气的情况,经常进行细致的观测,了解并掌握各种回波的特性、识别方法及所要操纵船舶雷达的性能特点等等,选取合适的物标进行测量以及运用正确而有效的定位方法,不断的进行修正,并做好记录,进行比较、分析、归纳和总结。
船舶定位的基本要求是准而快。要准而快,除目标的辨认要准外,还要求目标选择得合适以及距离和方位的测定方法正确。选择物标应遵循的原则是:目标的回波图像稳定清晰,能与海图精确对应的物标,应尽量选用近而可靠的目标,不用远而容易搞错的物标,避免选用可能严重变形或位置难以在定限制图上确定的目标,如平坦的岸线、山坡等。
3.1.1 雷达回波识别辨认
我们已经知道,雷达图像上由于种种系统和人为操作原因与实际海图是不一样的,有时甚至差别很大。比如,雷达荧光屏上不仅有真正的目标回波,而且还会有个各种假回波和干扰杂波;真目标回波也由于各种原因会有不同程度的变形,由于这种变形以及阴影扇形等原因还可能使岸线回波发生变化—连续岸线变成断续的,而断续岸线(如河口、矶头等)却变成连续的,还有些实际存在的目标在雷达屏上却不显示,等等。因此,在雷达定位前应谨慎认真的识别回波和辨认回波是十分重要和必要的。
在雷达屏上辨认目标时,要根据海图、长江定限制图、水文、气象等相关资料仔细研究本船附近河道岸线各种物标的特点,再结合本船雷达的性能,当时的气象和环境状况等,分析各种目标在雷达屏上可能引起的各种变形,然后找出特点明显,不会造成混淆的物标(如孤立的岛礁、岬角、灯塔、示位标等),将其作为参考点,按他们的相对位置逐一加以辨认,再三核实后加以确认。而在长江这种通航密度较大的水域,缺少位置确切可靠的目标,草率的选择定位目标并用于船舶定位导航,无疑是非常危险和致命的。
3.1.2 物标方位测定
在雷达测量过程中,为提高方位的测量精度,测量方位应该注意的问题有:
1)正确调节显示器控制面板上各个相关的控钮,使回波图像清晰饱满。
2)应选择合适的量程,使物标回波显示于1/2—2/3量程区域,并注意选择图像稳定显示方式(如“北向上”)。
3)各控钮应调节合适,应避免使图像变形而引起测量误差。
4)应仔细调节使扫描中心与显示屏重合。
5)用电子方位标志测量方位时,应注意校核电子方位标志的准确度。
6)测量点目标时,标尺线应与回拨中心相切;测量横向岬角突堤时应测量其边缘,
然后修正因波束宽度及光点直径引起的畸变部分。
7)测量方位的先后顺序是先首尾方向后正横方向。
8)检查船首线是否在正确的位置上,应校核分罗经、主罗经及船首线所指的航向值是否一致。
9)船舶在摇摆时会产生较大的方位误差,测量方位时应尽量避免在有倾角的情况下测量。实在不可避免时,则横摇时应测量正横方向的目标方位,纵摇时应测量首尾方向的目标方位,避免测量四个隅点方向的物标方位。
3.1.3 物标距离测定
在运用雷达测量距离时,为减少测距误差,测量时应注意:
1)正确调节显示器控制面板上各个相关的控钮,使回波图像清晰饱满。
2)应选选择包含所测物标的合适量程,使物标回波显示于1/2—2/3量程处。
3)应定期将活动距标和固定距标进行对比和校准。
4)活动距标应和回波正确重合,即距标圈内缘与回波前沿(内缘)相切。
5)尽量选用短脉冲发射工作状态,以减少回波外侧扩大效应。
6)不要用回波余辉测量距离。
7)测量的先后顺序应先正横物标再首尾物标。
3.2 方位定位
当利用两个以上的雷达方位测定船位时,其方法如同陆标方位定位。最好选择点状的孤立无标测定方位。若测岬角方位,应改正由雷达水平波束宽度所引起的方位误差,该误差值约为水平波束宽度的一半。方位定位具有作图简单、迅速、直观等优点,是最基本和最常用的定位方法之一,但其缺点是定位容易出现较大误差,所以在雷达各种定位方法中定位精度最低。
3.2.1 两方位定位
在本船雷达显示屏上选择两个合适的容易辨别的物标,用雷达的电子方位线迅速的测量出两物标的方位,并在内河定线制图或海图上绘画方位位置线,求出雷达的观测船位,由于在雷达观测、和作图过程中会不可避免的出现一定的误差,因此上述雷达观测船位并不是真实的船位所在,只能认为是当时的最概率船位。
3.2.2 三方位定位
两物标方位定位简单、直观,但在一般情况下两条方位位置线总是会相交在一点,难以判断雷达观测船位的准确性,如若条件允许,应使用三方位雷达定位法,即同时观测或在瞬间观测三个物标的方位来测定船舶的位置。三方位定位时,三条观测方位位置线大部分情况下不会相交于一点,而是形成一个误差三角形,在大比例尺定线制图或大比例尺海图上尤为明显。如果雷达方为定位出现差错,会形成较大的误差三角形来提醒观测者。另外,通过对误差三角形的正确处理,还可以减小雷达观测船位误差,因此,在进行雷达方位观测时,应首选运用雷达三方位定位。
3.2.3 雷达方位误差的调整方法
在雷达方位测量时,为尽可能的减小测方位定船位的误差,首先应尽量减少因雷达系统造成的可控误差,即在雷达调控时,应使雷达的图像饱满、清晰、观测时,调节合适的显示方式,使图像稳定,并把本船的显示点放置在雷达的中心位置。而选择物标时,应选择孤立显著定线制图位置准确、雷达显示屏上容易辨认的近距离物标。若不考虑系统误差的影响时,在两方位定位时,应尽量选择夹角60°-90°的两物标进行测量;而在三方位测量时,若测量后在定线制图(海图)上求的一误差三角形为近似直角三角形时,确定船位应靠近直角处一点,近似等腰三角形,其最概率观测船位位于近短边中心。当雷达测得的三方位误差三角形较大时,应在短时间内进行重复测量,再根据不同情况作出相应的处理:三角形基本消除或明显缩小,可以认为初次雷达观测所得的大三角形是由于测错、认错物标等粗误差引起的,新的小三角形是消除粗差后,由于合理的随机误差所引起的误差三角形;三角形的大小和方向无显著变化时,可以认为观测方位中存在较大的系统误差,可以采用雷达差值法或与罗经结合的方法进行调整和处理。
3.3 距离定位
雷达距离定位是最常用的雷达定位方法,这是因为雷达测距精度较高的缘故。选择一般应以三物标距离定位为宜,其三条位置线交角应接近120°.如无合适的三物标,则可选择两个方位接近90°或者大于30°、小于150°的物标。利用三物标距离,定位如果出现小误差三角形,一般将其中心作为观测船位;如果出现大误差三角形,可能是认错物标、读错距离或误定测量点,应分析原因,纠正错误,重新测量。
3.3.1 距离定位方法
一般较为常用的雷达距离定位方法有两种:一种是三物标距离定位,因其定位精确,测量距离时误差往往较小,另外若出现误差小三角形时,也可以取其三角形的中心来减小误差;另外一种是两物标距离定位。
3.3.2 距离定位船位误差
因为船舶在沿岸航行、狭水道如长江流域航行时,如果能同时在雷达屏幕上测得船舶与附近的两个物标的之间的距离,则可以分别以两个定限制或海图上的物标为圆心,以相应的雷达观测距离为半径绘画距离位置线,其中靠近推算船位的一个点即为当时的观测船位,根据距离定位的观测以及定位方法可知,关键在于物标的选取,雷达屏幕上物标的辨认、测距以及三距离定位时误差三角形的处理。
3.3.3 提高物标距离定位精度方法
为了提高两距离定位观测船位的精度,即减小观测船位系统误差和船位误差圆半径,则应尽量选取孤立显著、海图(定限制图)位置准确的物标,且两夹角应尽可能接近90°,在雷达屏幕上观测的时候应遵循“先慢后快”的原则,先观测正横附近、距离变化慢的物标;后观测首尾线附近、距离变化快的物标。而在减少雷达的系统误差的时候,应将雷达各项控钮都调整到准确合适的位置,即使雷达回波图像清晰饱满,雷达的显示方式稳定不变。而在三距离观测定位时,会形成一个误差三角形,而误差三角形的处理方法与雷达三方位误差三角形的处理方法类似,即要做到当误差三角形较大时,应在短时间内迅速的重复测量,查找原因。以尽量提高距离定位的精度。
3.4 方位距离定位
在运用雷达进行定位时,对于孤立、显著的单物标,可以利用雷达同时测量其距离和方位加以确定船位。对于点状物标,应测定回波影像中心的方位距离。如果是有一定长度的孤立小岛,应测小岛两侧的方位和小岛的距离来进行定位,单物标方位距离定位是航海上经常使用的一种定位方法。只要能同时测得某物标的方位和距离,就可以确定观测时刻的船舶位置。利用雷达观测单一物标的方位和距离定位,既可以解决某些物标因距离较远、方位变化慢造成的移线定位困难,又可避免推算误差和风流等对移线定位的影响。此外,单标方位距离定位,在海图(内河定限制图)上两位置线的交角始终等于90°,因此船位误差相对较小。单物标方位距离定位,船位的误差主要取决于观测方位和观测距离的精度,其雷达系统误差和随机误差相比对测量精度的影响较小,因此,提高单物标的方位距离定位的关键是减小随机(人为操作)误差,这就要求观测员在进行测定时要有着过硬的雷达测量操作以及海图(内河定线制图)的绘画技术。
4 雷达在船舶导航中的应用
作为现代航海雷达的主要功能之一,利用雷达导航已经成为现在船舶航行的必备功能。尤其是在长江等内河航行的船舶,由于其与海洋航道相比,河道相对较窄,切通航密度较大,雷达在内河航行时中担负着避险、保证船舶航行安全的作用,其在内河应用更加广泛
4.1 雷达导航方法
利用雷达进行导航的方法很多。在沿岸航行时,相对来说,水域较宽、危险物较少,时间也稍宽裕,用连续定位法较好。在狭水道航行时,航道窄、水流急、船舶多,时间较紧迫,用连续定位法较困难,在特定水域,可以用事先画好的距离格网或方位格网导航也较方便。但一般较常用的则是采用避险线导航。
避险线有距离圈避险线、利用平行标尺的距离避险线、方位避险线以及水平夹角避险线等,其中,前四种较常用,而且方位避险线常和距离圈避险线一起使用。
4.1.1 距离避险线法
当所选择的避险参考物标与危险物的连线与计划航线垂直或接近垂直时;或航线与岸线平行或接近平行时,采用距离避险线导航较好。具体做法是;先根据物标的回波特性及雷达测距时对物标的要求选定参考物标,然后在海图上测定出参考物标至危险物的距离,并根据当时当地的情况(如天气、能见度、流向流速、船舶密度及种类)、本船的操纵性能、当值驾驶员的技术状况等决定避险安全距离(离参考物标的距离),再把活动距标调到安全距离,把方位平行标尺指向船首线(有风流时采用真北向上显示方式,平行标尺应放在计划航向上)并从中找出与活动距标圈相切或最接近切点的标尺线,此即距离避险线。航行时,随时调整船位使避险参考物标始终处于选定标尺线(距离避险线)的外侧,即可保证本船避开危险物按计划航线航行。
在运用距离避险线法进行导航时,应该特别注意下列情况:
1)选好参考物标: 应选择较为显著、不易搞错的物标作为参考物标。
2)定好安全距离:根据天气情况、海面状况、风、流、能见度、船舶操纵性能、船舶密度及船员驾驶技术等决定合适的安全距离。
3)将方位标尺平行于船首线,将VRM定于安全距离上,找出与VRM相切的平行线,调整船位,使参考物标回波始终处于避险标尺线之外。
4.1.2 雷达方位避险法
当所选避险参考物标与危险物的连线与计划航线平行或接近平行时;或航线与岸线垂直或接近垂直时,采用方位避险线导航较好。具体做法是:先根据物标的回波特征及雷达测方位时对物标的要求选定参考物标,然后在海图上测出参考物标至危险物的真方位,并根据当时当地的情况、本船的操纵性能、雷达的可能误差、当值驾驶员的技术状态等决定避险真方位,再把方位标尺指向该避险真方位加180°的位置作为方位避险线(此时,雷达应选用真北向上显示方式)。航行中,随时调整船位使避险参考物标始终处于方位标尺(避险方位线)的安全一侧,即可保证本船避开危险物, 方位避险线还常与距离圈避险线联合使用。只有在本船处于方位避险线危险一侧且离避险参考物标距离小于避险距离时才有危险,即:在雷达荧光屏上避险参考物标进入避险方位线船首线一侧且进入避险距离圈内时;本船将有危险。
在利用雷达方位避险法进行导航时,应特别注意:
1)选好参考物标:显著、不易搞错。
2)定好安全方位(真方位):根据天气情况、海面状况、风、流、能见度、船舶操纵性能、船舶密度及船员驾驶技术等决定。
3)将方位标尺放在避险方位上(真方位,非舷角),调整船位,使参考物标回波始终处在避险方位标尺线的外侧。一般还于安全距离圈连用。
4.2 雷达导航注意事项
在进出港或在狭水道航行时,特别是在恶劣天气条件下航行时,由于条件复杂、时间紧迫,不可能花很多的时间来判读图像、作图、解算等,要求值班驾驶员根据图像及当时当地的形势立即采取正确措施以保证安全航行。在雷达导航中应注意以下几点:
1)在进入导航区前,应该提前作好资料准备,设计航线(包括定好避险标 、转向参考物标等),仔细研究导航区的情况,找到主要目标,转向点位置以及转向数据、导航目标及危险物的位置特点。
2)狭水道航行,由于陆标较近,方位变化较快,一般不允许像在近海航行那样作图定位,而只能根据雷达图像及当时的情况即时导航。这就要求对图像的判读要准而快,并且准备工作要做的充分。随时对照海图(内河定线制图),辨认物标,核实船位。
3)狭水道主要用浮标标志航道,因此要确认浮标,并应以岸标为准就必须熟悉它们的特点,了解它们的探测距离,认真识别。
4)长江内河等狭水道中,出现注意假回波的可能性打,要注意区分假回波、小船回波与浮标回波,应仔细辨别,不可混淆。
5)应充分利用EBL、VRM等,协助判断船位、节省时间。
4.3 雷达在长江雾航中的应用
长江中下游河道宽阔,流路曲折,汊河发育,洲滩众多。河道宽度初局部较窄外,一般都在1千米以上。江阴以下的河道由于潮汐的影响,可能会更宽,而江阴的慈河口一下,河床宽窄相间,呈串珠状,汊河发育,洲滩众多,这在给雷达在雾航中的应用提供了更为广阔的平台。而在长江雾航过程中,如何准确的运用雷达进行导航和避碰,确保船舶的安全行驶是一名合格驾驶员的必备技术。
在长江雾中航行时,因为其水道一般较为曲折,这就给值班驾驶员要做好航迹推算的工作带来了困难。为提高船位的准确性,船舶驾驶员应尽可能利用一切手段来进行定位和导航,尤其要充分的使用雷达。目前在长江雾航中,雷达已经成为不可缺少的助航设备,而且随着船用雷达技术性能的不断提高,它必将发挥越来越大的作用。
为了使浮筒、灯船和灯塔等重要目标容易被雷达发现,常在这类导航标志上加设各种雷达航标,以增强其对雷达波的反射能力,从而增大雷达发现这些航标的距离。几种常见的雷达航标有:雷达角反射器、雷达方位信标、雷达应答标,这些雷达航标是雷达定位更加的方便。
用活动距标圈和电子方位线连续测量目标回波的距离和方位,若距离不断缩小,方位却基本不变,则说明存在碰撞危险。若方位不断的增大,说明本船正在横越他船船首;若方位不断减小,说明他船正在横越我船船首。以上两种情况一般都不存在碰撞危险。但是在特殊情况下,即使方位有明显的变化也可能存在着碰撞危险,例如,在长江中当本船驶近一艘大船或者拖带船队时,或者在近距离驶近他船时,本船虽然不会与他船(队)的雷达反射点相碰撞,但与之首尾相碰。
在长江雾航中,由于视距受到限制,单凭肉眼很难或根本无法判断他船的动态。驾驶员必须采取一切可以采取的措施来判断他船的动态,判断有误碰撞危险。而雷达则是船舶在长江雾航中的最有力武器。值班驾驶员只有在明确有无碰撞危险后,才可以确定是否可以采取转向避让的措施。倘若对方船舶的动态掌握不清,或有疑虑时,切忌盲目用舵转向避让,关于这一点,《避碰规则》第十九条有着明确的规定:除已断定不存在碰撞危险外,每一船舶在听到他船的雾号显示在本船正横以前,或者与正横以前的他船不能避免紧迫局面时,应将航速减小到能维持航向的最小速度,必要时应把船完全停住,而且无论如何应及其谨慎的驾驶,直到碰撞危险过去为止。
而雷达在长江雾航时所应选取的显示方式是新航向向上相对运动显示,该显示方式既能直观的判断来船与本船的位置关系,有恩能够保持图像的稳定清晰,在本船改向前(即直航时),代表本船的扫描中心在屏中心保持不动,目标回波相对于本船首向上运动的功能,驾驶员观察到的水面动态与屏上的图像一致,这就相当于船首向上运动的功能;当本船改向时,船首标志线随之转动(最终指向新航向值),而目标回波不随之转动,整个图像不动,从而保持了图像清晰,便于观测,也便于定位,这相当于北向上相对运动显示方式。
由于长江的复杂地域环境以及较为稠密的通航密度,导致了在长江航行的船舶无法进行人工标绘,但雷达在判断碰撞危险以及避碰时对船舶还是有较大的帮助。
5 雷达定位精度实例分析
5.1航海雷达定位实测数据
笔者在长航凤凰公司荣江15003轮实习期间采用不同雷达定位方法进行观测,实测数据如表1、2、3。
表1单物标方位距离定位
物标名称 观测数据 推算船位 GPS船位 误差值
带子洲
塔形岸标 236.1°
1.249㎞ 32°11. ′02N
119°01. ′37E 32°11. ′079N
119°01. ′701E . 059′
. 331′
南新圩
示位标 003.7°
1.775㎞ 32°11. ′53N
119°19. ′20E 32°11. ′497N
119°19. ′293E . 033′
. 073′
朱家洲
塔形岸标 082.3°
2.401㎞ 32°11. ′52N
119°01. ′37E 32°11. ′497N
119°19. ′293E . 022′
. 077′
龙爪岩
示位标 339.4°
5.328㎞ 31°54 ′79N
120°53. ′01E 31°54. ′826N
120°52. ′933E . 036′
. 077′
新开闸
示位标 123.0°
4.571㎞ 31°54. ′82N
120°52. ′89E 31°54. ′826N
120°52. ′933E . 006′
. 043′
凤凰矶
矶头 019.3°
.688㎞ 31°07. ′27N
118°59. ′33E 31°06. ′725N
118°59. ′893E . 545′
. 563′
板子矶
矶头 358.2°
2.361㎞ 31°06. ′49N
119°00. ′24E 31°06. ′725N
118°59. ′893E . 235′S
. 327′
段山港
示位标 251.8°
3.464㎞ 32°00. ′47N
120°34. ′13E 32°00. ′589N
120°34. ′204E . 119′
. 074′
大新
示位标 154.3°
2.037㎞ 32°00. ′64N
120°34. ′31E 32°00. ′589N
120°34. ′204E . 051′
. 106′
华达
示位标 248.8°
2.344㎞ 32°00. ′52N
120°34. ′28E 32°00. ′589N
120°34. ′204E . 069′
. 076′
长青沙
示位标 010.6°
2.738㎞ 32°00. ′51N
120°34. ′13E 32°00. ′589N
120°34. ′204E . 079′
. 074′
忠孝矶
矶头 086.9°
1.463㎞ 31°04. ′12N
117°45. ′73E 31°04. ′865N
117°45. ′138E . 745′
. 592′
表2目标方位定位
物标名称 观测数据 推算船位 GPS船位 误差值
南新圩
朱家洲塔形岸标 003.7°
082.3° 32°11. ′29N
119°19. ′84E 32°11. ′497N
119°19. ′293E . 207′
.547′
龙爪岩示位标
新开闸示位标 339.4°
123.0° 31°54. ′97N
120°52. ′42E 31°54. ′826N
120°52. ′933E . 144′
. 513′
段山港示位标
如埠港下示位标 251.8°
346.7° 32°00. ′15N
120°34. ′09E 32°00. ′589N
120°34. ′204E . 439′
. 114′
段山港示位标
大新示位标 251.8°
154.3° 32°00. ′83N
120°34. ′42E 32°00. ′589N
120°34. ′204E .241′
. 216′
长青沙示位标
华达示位标 010.6°248.8° 32°00. ′15N
120°34. ′09E 32°00. ′589N
120°34. ′204E . 439′
. 114′
华达示位标
大新示位标 248.8°
154.3° 32°00. ′87N
120°34. ′46E 32°00. ′589N
120°34. ′204E .271′
.256′
如埠港下示位标
华达示位标
大新示位标 346.7°
248.8°
154.3° 32°00. ′36N
120°34. ′18E 32°00. ′589N
120°34. ′204E .229′
. 024′
段山港示位标
大新示位标
长青沙示位标 251.8°
346.7°
010.6° 32°00. ′45N
120°34. ′49E 32°00. ′589N
120°34. ′204E . 139′
. 286′
表3目标距离定位
物标名称 观测数据 推算船位 GPS船位 误差值
南新圩
朱家洲塔形岸标 1.775㎞
2.401㎞ 32°11. ′59N
119°19. ′43E 32°11. ′497N
119°19. ′293E . 093′
.137′
龙爪岩示位标
新开闸示位标 5.328㎞
4.571㎞ 31°54. ′64N
120°52. ′77E 31°54. ′826N
120°52. ′933E . 186′
.163′
段山港示位标
如埠港下示位标 3.464㎞
6.682㎞ 32°00. ′69N
120°34. ′41E 32°00. ′589N
120°34. ′204E . 101′
.206′
大新示位标
段山港示位标 2.037㎞
3.464㎞ 32°00. ′48N
120°34. ′29E 32°00. ′589N
120°34. ′204E . 109′
. 084′
华达示位标
长青沙示位标 2.344㎞
2.738㎞ 32°00. ′35N
120°34. ′04E 32°00. ′589N
120°34. ′204E . 239′
. 164′
华达示位标
大新示位标 2.344㎞
2.037㎞ 32°00. ′73N
120°34. ′18E 32°00. ′589N
120°34. ′204E . 141′
. 004′
华达示位标
大新示位标
如埠港下示位标 2.344㎞
2.037㎞
6.682㎞ 32°00. ′51N
120°34. ′18E 32°00. ′589N
120°34. ′204E . 079′
. 024′
大新示位标
长青沙示位标
段山港示位标 2.037㎞
2.738㎞
3.464㎞ 32°00. ′65N
120°34. ′29E 32°00. ′589N
120°34. ′204E . 061′
. 084′
5.2 雷达定位分析
雷达的定位精度由两方面影响,一是物标测量精度;二是系统本身的误差。下面分别对雷达定位时的物标测量及系统误差进行分析。
5.2.1 雷达目标的影响
从上面的雷达定位数据一览表数据可以明确的看出,雷达示位标以及岸标的回波定位数据明显比长江矶头的定位数据来的更加精确,其原因除了雷达的系统误差造成回波显示问题,还存在矶头的回波存在辨认失误或不易辨认,因而造成其数据精确度较低,在运用雷达的单物标方位距离定位时,运用孤立的显著的雷达示位标进行定位,其定位精度比较高。
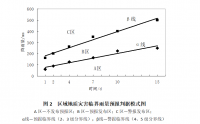
目前航海雷达多为脉冲雷达,常规脉冲雷达周期性地发射高频脉冲,相关的参数为脉冲重复周期(脉冲重复频率)、脉冲宽度以及载波频率。载波频率是在一个脉冲内信号的高频振荡频率,也称为雷达的工作频率。普通的航用雷达可分为X波雷达及S波雷达,s波雷达探测距离远,但雷达灵敏度低;x波雷达探测距离近,测物标灵敏度较高。驾驶员应根据不同的情况采取不同的波段雷达进行定位。
一般而言,影响距离定位精度的因素有:雷达扫描起始时间与发射脉冲离开天线口的时间不一致;固定距标和活动距标的不精确引起的测距精度;扫描锯齿波的非线性;光点重合不准导致的误差;脉冲宽度造成回波图像外侧扩大引起的测距误差;物标回波闪烁引起的误差;雷达天线高度引起的误差。
影响测方位定位的精度有:天线波束宽度及波束形状不对称引起的误差;方位同步系统的角数据传递误差;船首标志线的误差;中心偏差;天线波束主瓣轴线偏移角不稳定引起的误差;水平波束宽度及光点尺寸造成“角扩大”误差;方位测量设备的误差;本船倾斜或摇摆导致的误差;人为测量误差。
5.2.2 不同定位方法的精度比较
通过对上述雷达数据分析,可以得出:两物标距离定位精度最高;单物标方位距离定位精度次之;两方位定位精度最低。其原因是雷达的方位测量精度比距离测量精度低,因此应尽量采用距离定位方法,以提高雷达定位精度。对于单物标方位距离定位方法,则应注意选择可靠的定位目标。
结论
笔者通过长江航行中使用雷达,分析其导航中的突出作用。通过对雷达定位的数据分析,进一步了解各种定位方法的精度。在长江流域的定线制航道中,雷达有着不可或缺的作用。应清醒的认识到,雷达作为一个助航仪器,有其本身的局限性和缺点,船舶在长江航行时可以借助雷达作为辅助设备,但却不能完全依赖雷达,更不能仅仅局限于雷达系统所提供的数据而武断的做出定论。值班驾驶员必须练就安全瞭望安全驾驶的本领,综合各方面的信息和局势,做出正确有效的指令,并运用一切可以运用的手段来确保船舶的安全航行。
参考文献
1)张杏谷主编,航海雷达,大连海事出版社2010.8。
2)王世远主编,航海雷达与ARPA,大连海事大学出版社1998.8。
3)孙文强等,雷达观测与标绘,大连海事大学出版社1998.10。。
4)滕小辉,雷达方位误差的调节方法,航海技术2004(4)。
5)郑道昌,普通船用雷达改装为多功能船用雷达的设想,宁波大学学报2001(3)。
6)汪龙生,岛礁区船舶导航的几种方法, 世界海运1998(3)。
7)洪得本等,ARPA中可能碰撞点PPC的计算与分析,大连海事大学学报2000(3)。
8)(美)Merrill I.Skolnik著,王军泽等译,雷达手册,电子工业出版社,2003。
9)徐德云等,雷达视频地图在导航中的正确使用,世界海运2000(5)。
10)倪德山,雷达在明石海峡的应用,世界海运2000(6)。
11)(英国)A.G.Bole、W.O.Dineley著 Radar and ARPA Manual,Courier International,Tiptree,Essex 出版,1990。
12)《Safety at Sea》、《Marine Technology》、《 Seaways》等期刊中的相关文章,并选择一篇翻译为中文。



