





















可变形仿生翻滚四足机器人结构设计
摘要: 移动机器人是科学技术进步的产物,更是人类无限幻想和智慧的结晶。移动机器人在军事、生产、生活以及科学研究中还有着许多潜在的应用前景。移动机构决定了移动机器人的综合移动性能,是移动机器人能够在工作环境中实现快捷、平稳、精确、高效移动的关键。
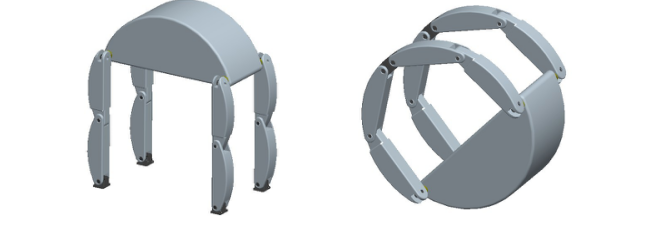
为了提高机器人的移动效率,同时也为了降低机器人结构的复杂性,本课题从现代仿生学原理出发,将自然界中的翻滚运动引入到四足机器人结构当中,并借鉴可重构机器人理论,首次提出一种具有翻滚模式和步行模式的可变形仿生翻滚四足机器人,达到用一种机构实现两种运动的目的。
本文对可变形仿生翻滚四足机器人进行了总体方案设计,选定了结构参数,和驱动方式。详细地对机器人的本体结构进行了设计,并对机器人关键部位进行了校核。
本课题提高了四足机器人的环境适应能力,拓展四足机器人的应用领域,而且丰富了移动机器人学科的理论和实践,对移动技术的发展和高机动性移动平台的开发具有一定的借鉴作用,具有重要的理论意义与实际应用价值。
关键词:四足机器人;仿生翻滚;可重构机器人;设计校核
Structural Design for a Reconfigurable Bionic Rolling Quadruped Robot
Abstract : Mobile robot is the product by scientific and technological progress, and also the crystallization of human infinite fantasy and wisdom. Mobile robot have many potential application prospect in the military, production, living and scientific research. The move mechanism of the robot determines the comprehensive move performance, also it’s the key for robot to work smooth, accurate and quick, efficient in the surroundings.
In order to improve the robot move efficiency, and also to reduce the complexity of the structure, this paper is based upon the modern bionics principle. The rolling style in nature is put into robot structure. Referencing reconfigurable robot theory, a reconfigurable bionic rolling quadruped robot is put forward, which has two move modes---- walk model and rolling model. In this way, it can achieve the purpose of using a mechanism to get two movement models.
General scheme design of the robot is made in this paper, structure parameters and drive mode are selected. Robot body structure is designed detailed, and the key parts of the robot are checked in this paper.
This topic raised the ability for robot to adapt environment, expand the application field of robot, and also enriched the discipline theory and practice for robotics. It has a certain reference of the development of mobile technology and high mobility mobile platform. So this paper has an important theoretical significance and practical application value.
Key words: quadruped robot; bionic rolling; reconfigurable robot; design and check
目 录
1绪论…………………………………………………………………………………1
1.1课题研究的目的与意义………………………………………………1
1.2移动机器人的应用领域…………………………………2
1.3国内外在该领域的研究现状………………………………………3
1.4主要研究内容…………………………………………5
2移动机器人系统………………………………………………7
2.1移动机器人系统组成…………………………………………………………7
2.2 传统移动机器人简介………………………………………………………………………………7
2.3腿式移动机器人……………………………………………………………8
2.4腿式机器人存在的问题及展望……………………………………………………………10
2.5轮式移动机器人……………………………………………………………11
2.6轮式移动机器人性能比较……………………………………………………………15
2.7履带式机器人……………………………………………………………16
3总体方案设计………………………………………………………………20
3.1结构外形设计………………………………………………………………20
3.2仿生翻滚运动方案设计………………………………………………………………………………………21
3.3结构基本参数…………………………………………………………………………………………………21
3.4驱动方案选择…………………………………………………………………22
4机器人设计…………………………………………………………………………24
4.1电机选择………………………………………………………………………………………………………24
4.2机械结构设计…………………………………………………………………………………………………26
5设计总结…………………………………………………………………………30
参考文献……………………………………………………………………………32
致谢…………………………………………………………………………………………………………………35
第一章 绪论
1.1 课题研究的目的与意义
移动机器人是科学技术进步的产物,更是人类无限幻想和智慧的结晶。目前,移动机器人已广泛应用于星际探测、消防救险、军事反恐、农业生产等关系到国民经济和国防建设的重要行业。随着作业功能的不断开发,移动机器人在军事、生产、生活以及科学研究中还有着许多潜在的应用前景。
广阔的市场需求使移动机器人的发展获得了源源不断的强大动力,也是与其相关的若干关键技术不断取得进步的根源所在。移动机构决定了移动机器人的综合移动性能,是移动机器人能够在工作环境中实现快捷、平稳、精确、高效移动的关键。三种传统的移动机构(轮式、足式和履带式)在本体结构的复杂程度、移动效率的高低以及控制的难易程度等方面都存在较大差别,环境适应能力上也各有所长。随着移动机器人所担负任务要求的不断提高,作业环境往往并不局限于单一特征,例如城市建筑平坦路面和楼梯台阶共存;又或者会应用于未知特征环境执行任务,例如火星表面。这种情况下,单一运动方式的移动机构将不再满足多重特征环境的任务需求。于是,兼具几种运动方式的移动机构正在成为研究的热点。
本论文从自然界中的仿生翻滚研究中获得启发:将自然界中的翻滚运动引入到四足机器人运动方式中,达到用一套机构实现两种运动方式的目的。课题的完成不但能够提高四足机器人的环境适应能力,拓展四足机器人的应用领域,而且丰富了移动机器人学科的理论和实践,对移动技术的发展和高机动性移动平台的开发具有一定的借鉴作用。因此,开展具有仿生翻滚运动方式的四足机器人结构设计具有重要的理论意义与实际应用价值。
1.2 移动机器人的应用领域
移动机器人是一种集传感器、遥控操作器和自动控制的移动载体组成的机器人系统。移动机器人具有移动功能,可代替人类从事危险、恶劣(如辐射、有毒等)环境下作业和人所不及的(如宇宙空间、水下等)环境作业方面,比一般机器人有更大的机动性、灵活性。因此,移动机器人的应用领域非常广泛,在各行业中均有不可忽视的作用。
1.2.1 工业领域
与传统的机器相比,移动机器人能够实现生产过程的完全自主化,对生产设备有高度的适应能力。制造工业部门应用机器人的主要目的在于削减人员编制和提高产品质量。汽车工业、机电工业、电讯工业、通用机械工业、建筑业、金属加工、铸造以及其它重型工业和轻工业部门都能看见机器人的身影。
1.2.2 农业生产
科学技术的飞速发展触使越来越多的科技工作者投入到农业机器人的研究当中。数字农业技术作为21世纪农业信息技术的重要标志之一,越来越受到科技的关注。移动机器人体积小,移动灵活,有一定的地形适应能力,因此可用于全面、实时地采集农田环境信息和作物的生长信息。将采集农田信息所需的传感器安装在移动机器人上,机器人在田间移动,实现农田信息的自动采集。
国外对这方面的机器人都有很深入的研究。日本研制了利用关节腿式来适应复杂地形的六足机器人。美国伊利诺伊大学开发的“watching-dog robot”,采用柔性的联动悬架来适应复杂地形。AgAnt四足蚂蚁机器人群,通过无线蓝牙互相传递信息,可以在田间巡视。
国内主要采用定点架设传感器或将传感器装载在拖拉机等大型农业设备上的方法,随着农机的移动来获取不同位置的信息。



