





















玻璃幕墙爬墙清洗机器人设计
摘要
摘 要:近年来,随着社会的发展,楼层越来越高,使用玻璃幕墙的楼房也越来越多,避免清洗时一个很重要的问题,传统的方式多数为人工,或者是采用电缆从楼顶将机器人吊下,工作效率偏低,危险性高,于是清洗用爬壁机器人应运而生,本文结合国内和国外对机器人的研究状况的基础上,介绍了,对于自动墙壁清洗机的设计,它具有风压吸附和四个轮子。对齿轮部分进行了设计计算,对轴进行校核计算。然而重点是爬壁机器人的移动结构要怎么设计,要采取怎样的驱动系统,使清洗机运动,还有它的吸附结构设计计算。下面简单介绍下,擦洗主机是采用先进的控制系统和悬吊系统组成,它是自动擦洗,不需要人工,且可以自动供水。该机构采用单片机系统控制,我们只要按按键就可以实现功能。因为用了此功能,它还可以对边缘进行识别,进行识别后得出数据,我们就可以选择是纵洗或横洗。它用四个轮子进行移动,小车形状。这样设计使之结构简单,可以降低成本。在吸附方式上采用的是风压吸附方式,它是用螺旋桨疯狂的抽空气,然后就形成了压强,可以使机器人压在墙上或玻璃上。这种方式有着极大的好处,降低了控制难度,避免了机器人对壁面的局限。在楼顶上供电;清洗机一共有四个轮子,由后轮带动前轮运动,机器人就可以行走了。还有它的减速器采用的是直齿圆柱齿轮传动。该机器人可以在任意的水平面行走,也可以在垂直面行走。它的擦洗效率也是极高的,刷子带有许多毛,可以广泛的进行清洗,根本不用担心留有死角或清洗不到的地方。
关键字:清洗机器人;风压吸附;齿轮机构;刷洗
Abstract:In recent years, with the development of society, the floors have become higher and higher, and there are more and more buildings using glass curtain walls. Avoiding cleaning is a very important issue. Traditional methods are mostly manual, or using cables to lift robots down from the roof, which has low work efficiency and high risk. Therefore, wall climbing robots for cleaning have emerged. Based on the research status of robots at home and abroad, this article introduces, For the design of an automatic wall cleaning machine, it has wind pressure adsorption and four wheels. The gear part was designed and calculated, and the shaft was checked and calculated. However, the focus is on how to design the mobile structure of the wall climbing robot, what driving system should be adopted to make the cleaning machine move, and how to design and calculate its adsorption structure. Below is a brief introduction. The scrubbing host is composed of an advanced control system and a suspension system. It is automatic scrubbing, does not require manual labor, and can automatically supply water. This mechanism is controlled by a microcontroller system, and we can achieve its functions by pressing the button. Because of the use of this feature, it can also recognize edges and obtain data after recognition, allowing us to choose between vertical or horizontal washing. It moves on four wheels, in the shape of a small car. This design makes the structure simple and can reduce costs. In terms of adsorption method, wind pressure adsorption is used, which uses a propeller to crazily extract air, and then forms a pressure that can make the robot press against walls or glass. This method has great benefits, reducing the difficulty of control and avoiding the limitations of the robot on the wall. Power supply on the roof of the building; The cleaning machine has a total of four wheels, which are driven by the rear wheels to move the front wheels, allowing the robot to walk. And its reducer uses a straight cylindrical gear transmission. The robot can walk on any horizontal plane or vertical plane. Its cleaning efficiency is also extremely high, and the brush has many hairs that can be widely cleaned without worrying about leaving dead corners or areas that cannot be cleaned.
Keywords: cleaning robots; Wind pressure adsorption; Gear mechanism; Brushing
目录
第一章 绪论 1
1.1 研究的目的及意义 1
1.2 国内外研究现状 1
1.2.1 国外壁面清洗机器人研究现状 1
1.2.2 国内壁面清洗机器人研究现状 2
1.3高层建筑外墙清洗机发展趋势 5
1.4清洁设备的分类及工作原理 6
1.4.1 按清洁方式分类 6
1.4.2 按发动机的形式分类 7
1.4.3 以除尘系统对清洗机的分类 7
1.5课题需要完成的任务 8
1.5.1 设计主要内容 8
1.5.2 设计工作基本要求 8
第二章 玻璃幕墙爬墙清洗机器人总体方案设计 9
2.1 清洁机器人的总体方案 9
2.2 玻璃幕墙爬墙清洗机器人擦洗系统方案 9
2.3 玻璃幕墙爬墙清洗机器人爬行系统方案 10
2.4 其它部分方案 11
2.4.1材料选择 11
2.4.2 轮的润滑问题 11
2.4.3 轴承的润滑问题 11
2.5 本章小结 11
第三章 玻璃幕墙爬墙清洗机器人主要零件设计 12
3.1 直齿轮副的设计计算 12
3.1.1 齿面接触疲劳强度计算 14
3.1.2 齿根抗弯疲劳强度验算 16
3.1.3 齿面静强度计算 17
3.1.4 齿根(抗弯)静强度验算 18
3.2 锥齿轮副的设计计算 18
3.2.1 基础尺寸确定 19
3.2.2 确定载荷系数K 20
3.2.3 齿面接触疲劳强度计算 20
3.2.4 齿根抗弯疲劳强度计算 21
3.3 本章小结 22
第四章 清洗机构系统设计 23
4.1 擦洗机器刷洗部分设计 23
4.1.1 盘刷设计 23
4.1.2 滚刷设计 24
4.1.3刷洗部分所用弹簧的设计 25
4.2 内空心轴设计 26
4.3 擦洗机主机滚轮的设计 26
4.4 主机上传感器及行程开关的选择 27
4.5复合缆的结构设计 27
4.6 本章小结 28
第五章 玻璃幕墙爬墙清洗机器人吸附系统设计 29
5.1 采用风压吸附的意义 29
5.2 基本原理 29
5.3 气动计算的原始数据与技术要求 29
5.4风压部分力学计算 30
5.5 本章小结 31
第六章 清洗机器人主要零件强度校核 29
6.1 直齿轮副的设计计算 32
6.1.1 齿轮的设计计算及强度校核 32
6.1.2 齿面接触疲劳强度计算 34
6.1.3 齿根抗弯疲劳强度验算 35
6.1.4 齿面静强度计算 37
6.1.5 齿根(抗弯)静强度验算 37
6.2 锥齿轮副的设计计算 38
6.2.1 基础尺寸确定 38
6.2.4 齿根抗弯疲劳强度计算 40
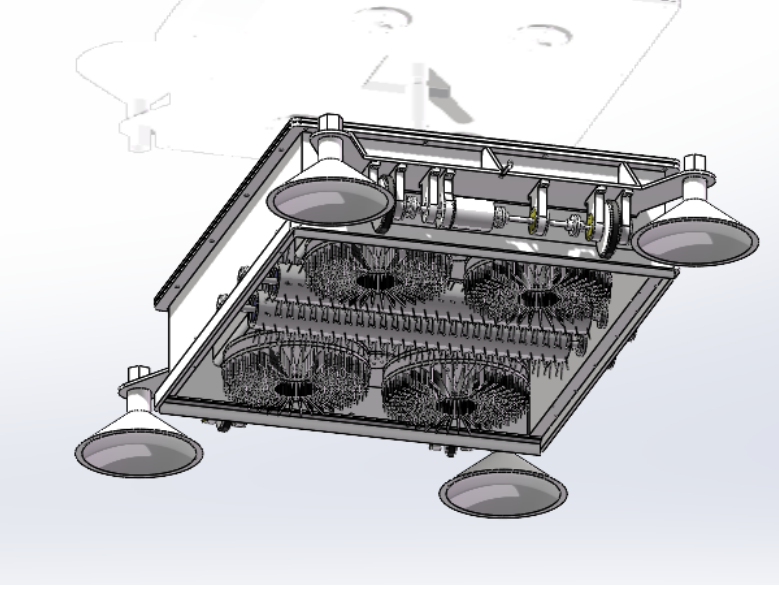
第七章 玻璃幕墙爬墙清洗机器人三维建模 42
总结 44
参考文献 45
致 谢 46
第一章 绪论
1.1 研究的目的及意义
随着城市现代化得发展和人口的日益增加,为了节省土地资源,高层建筑越来越多,各式各样的摩天大楼成为现代都市中一道亮丽的风景。在建筑业中,由于玻璃的采光性好,保温、防潮,而且采用彩色玻璃使用美观,高层建筑的外观越来越多的采用玻璃幕墙结构没有玻璃覆盖的地方也多采用瓷砖覆盖以增加建筑的美感,但也衍生出繁重的幕墙清洗任务。
我国大多数高层建筑清洗工作还是由传统的人力完成,这种高空极限作业相当危险,如遇强空气流,对人身安全及玻璃面都有很大的威胁。因此需要一种能代替人工完成高层建筑清洗任务又有一定灵活性和适应性的自动机器来取代人工作业。
高层外墙清洗机正是在这种背景下应用而生,它可在垂直壁面及屋顶移动进行物体表面的清洗。它的出现及进一步研究将极大降低建筑外墙的清洗成本改善工人的劳动环境,提高生产效率,并带来相当的社会效益和经济效益。
1.2 国内外研究现状
工业机器人已经在机器人领域中大量投入使用,如汽车、冶金等行业。然而,随着人们生活水平的提高,在机器人领域中,一种新的、有蓬勃生命力的服务机器人已经出现。
服务机器人主要涉及清洗、运送、监视、检查和探测等类型的工作,为人类提供和完成服务。其中,清洗是服务机器人应用最广的领域之一。而高楼林立的今天,更需要清洗机器人的技术可以得到不断改进和提高。
1.2.1 国外壁面清洗机器人研究现状
第一个成功制造出来的清洗机器人是德国汉萨斯航空公司委托制作的“SKYWAH”(清洗巨人)。其主要结构是一个作用距离为33米的多关节巨型伸缩臂,有11个自由度,6个主轴,3个腕关节及两个自适应轴,总共12个可编程序轴。其余的运动链系使得它可以做各复杂运动,而其结构不会有任何变化。所有轴均由液压驱动并采用抗拉钢材,因而其结构重量轻。清洗刷长1.2m,定位精度为50mm,滚刷与飞机外形精确匹配。该机器人安装在一个标准汽车底盘上,可以从四个位置出发,机器人在人的监视下按照预定的模式运动,完成对飞机几乎所有表面的清洗工作。其特点是动作灵活,适合于各种规格的飞机。
日本BE公司成功研制的一种固定轨道式自动擦窗机器人,机器人靠安装在楼顶的轨道及吊装系统使擦窗机对准窗户,沿固定安装在建筑物表面的导槽垂直上下移动进行清洗,清洗机构带有多个旋盘刷。该设备的自动化程度的效率都很高,但价格也很昂贵。另外,要求在建筑物设计之初就将擦窗系统考虑进去,铺设轨道,这大大限制了该机器人的使用范围及效率。
德国马格堡的弗劳恩霍费尔自动控制与操作研究所(IPA)是德国主要的生产及自动化研究中心,它研制了一系列清洗建筑物玻璃的自动系统。对柏林新建火车站的巨大玻璃隧道进行了自动清洗。该机器人悬挂在水平的横向轨道上,可沿轨道左右移动,同时横向轨道可以沿垂直导槽上下移动,从而完成对整块玻璃的清洗。
德国的Fraunhofer研究所研制了一种名为SIRIUSC壁面清洗机器人。该机器人作业时在机器人上方的建筑物顶部有一个随动小车,该小车除了起一个安全作用外,还是机器人位移的定位装置,机器人只能做上下运动,左右运动靠随动小车牵引实现。爬行机构是基于两队线性模块上,每个模块装有几个真空吸盘,每对模块有一个伺服电机驱动。
美国国际机器人公司研制了用于清洗摩天大楼的爬壁机器人“Sky Washer”,它重19.95kg,约0.9×0.9m,该机器人的移动由两组L型框架相对滑动,交替吸附来实现,每组框架有三只脚掌,每只脚掌上有两只真空吸盘,吸盘相对于壁面可以作直线运动,该机器人允许横向移动,并可跨越一定高度的障碍。同时配备有洗涤液和擦抹系统,以完成擦窗工作,作业能力为每天4645m2,并可越5cm高、25cm宽的障碍。
除此以外,加拿大、德国、西班牙、以色列、新加坡、奥地利、俄罗斯、英国、澳大利亚等国家相继开展了壁面清洗机器人的研究。
参考文献
[1]于今, 刘雪飞. 一种新型爬壁机器人研究[J]. 液压与气动, 2010, (10), 2003:22-26
[2]吴成东, 赵博宇, 陈莉. 一种基于DSP的爬壁机器人控制系统设计[J]. 沈阳建筑大学学报(自然科学版), 2002:21-34
[3]黄之峰, 王鹏飞, 李满天等. 基于柔性静电吸附技术的爬壁机器人研究[J]. 机械设计与制造. 2004:33-45
[4]刘明芹, 戴永雄, 黄文攀等. 小型吸附式爬壁机器人机械结构及平衡性[J]. 机械设计与制造. 2011:34-40
[5]马秋生. 机械设计基础[M]. 北京:机械工业出版社. 2010:37-50
[6]濮良贵, 纪名刚. 机械设计(第八版)[M]. 北京:高等教育出版社. 2006:27-35
[7]闻邦椿. 机械设计手册(第5版)[M]. 北京:机械工业出版社. 2010:35-67
[8]杨老记,李俊武. 简明机械制图手册[M]. 北京:机械工业出版社. 2008:44-52
[9]段正澄. 光机电一体化技术手册(上)[M]. 北京:机械工业出版社. 2010:23-35
[10]谈力士, 沈林勇. 垂直壁面行走机器人系统研制[J]. 机器人, 2004: 242-247.
[11]廖广奎,飞机清洗机器人“SKYWASH”[J]. 机器人技术与应用,1996:12-14.
[12]郑春崎. 国外机器人在建筑行业中的应用[J]. 沈阳建筑大学学报(自然科学版),2005:301-306.
[13]王积伟, 章宏甲, 黄谊. 液压与气压传动[M]. 北京:机械工业出版社, 2005:56-88
[14]杨建元. 吸附性爬壁机器人研究[D]. 西安:西安工业大学, 2007:23-88.
[15]唐伯雁. 自攀爬幕墙清洗机器人机械机构的设计与研究[D]. 北京:北京工业大学, 2005:34-78
[16]胡启宝. 多吸盘式玻璃幕墙清洗机器人本体设计[D]. 上海:上海大交通学, 2007:34-67
[17]张海洪. 机器人壁面自动清洗系统的工程研究[D]. 上海:上海大学出版社, 2001:12-35
[18]张铁. 机器人学[M]. 广州:华南理工大学出版社. 2001:23-66.
[19]王荣华. 爬壁机器人设计及动力性能研究[D]. 沈阳大学, 2007:156-178
[20]钱志源. 带滑动式吸盘的爬壁机器人运动特性分析及其应用研究[D]. 上海:交通大学, 2006:145-167.
[21]吴宗泽, 罗圣国. 机械设计课程设计手册[M]. 北京:高等教育出版社, 2003:1-163.
[22]吴洪兴, 赵言正, 高学山. 高楼玻璃幕墙清洗机器人作业系统的研究[J]. 哈尔滨理工大学学报, 2002:34-78
[23]谢存禧, 张铁. 机器人技术及其应用[M]. 北京:机械工业出版社, 2005:112-134
[24]陈敏华. 机器人机构的优化综合[J]. 机械设计, 2003:44-57.
[25]A.Nishi. Development of Wall-climbing robot[J]. Computer&Electrical Engineering, 2002, 22(2): 123-149.



