








基于plc物料分拣机械手系统设计
摘要:随着现代化生活节奏的加快,机械手的地位和作用逐渐得到人们的关注和重视。机械手目前虽然还不能像人手一样活动自由,灵活,但是它跟人类不同的地方在于:它具有可以一直的、反复不断地重复同一件工作,并且也不会觉得的有半点的疲惫的特点,而且它还能在一些极其危险的环境中工作,这些都是人类无法与其相比的,此外它的手臂抓取得重量比人手所抓取的大的多。
根据机械手的在现在生活中的发展,在结合其机械工业中的应用和机械手在别的地方的设计使用,本文选择采用气动控制和PLC控制的设计方案。利用软件和硬件的互补形式来进行设计与选择,硬件上将对机械手的手臂和机座等选择;软件上对传感器的类型采取选择,PLC的类型与种类采取选择等等,来实现机械手的自动控制,以及发生故障时及时报警的作用
关键词:机械手;气动部分控制;PLC控制
Design of based on PLC material sorting manipulator
Abstract: with the quickening pace of modern life, the status and role of the manipulator have been paid more and more attention.Manipulator at present although like human activities can not free, flexible, but it is different from human is that it could have been, repeat the same work over and over again, and also won't feel a little tired, but it can also work in some of the most dangerous environment, these are not compared to human, moreover its arm to grasp gain weight more than hands grab.
According to the development of manipulator in the present life, in combination with the application of mechanical industry and the design of the manipulator in other place to use, this paper adopts pneumatic control and PLC control design scheme.It is mainly composed of three parts: hand, moving parts and PLC control system.Using software and hardware complementary form to design and choose, the hardware will be on the arm of the manipulator and the base of the choice;In the software, the type of the sensor is selected, and the type and type of the PLC are selected, etc., to realize the automatic control of the manipulator, and the failure alarm and other functions.
Key words: manipulator;Pneumatic control;PLC control
目录
第一章 前言 1
1.1研究的目的及意义 1
1.2机械手的发展趋势 1
1.3主要研究的内容 2
第二章 机械手的总体设计 4
2.1执行机构 5
2.2驱动机构 5
2.3控制机构 6
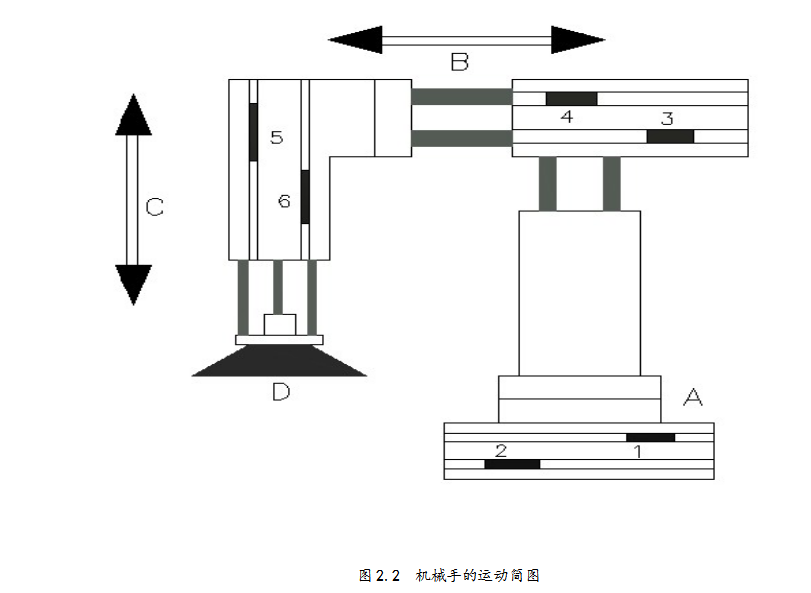
2.4机械手的动作示意图 6
第三章 机械系统的设计 8
3.1坐标式的选择 8
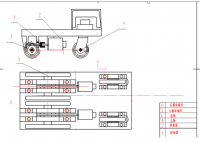
3.2机械手的设计 8
3.2.1 真空吸盘的选择 9
3.2.3伸缩气缸直径的选择 11
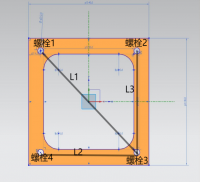
3.2.4底座的结构图 13
3.2.5支撑架的设计 14
第四章 控制系统的硬件设计 15
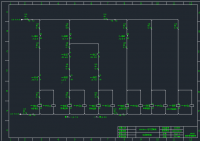
4.1气动系统的设计 15
4.1.1空气压缩机的选用 15
4.1.2 气动回路的设计 15
4.2位置检测系统设计 16
4.3外部接线图 17
4.4元器件的选型 18
4.5电气柜的设计 20
第五章 软件系统的设计 21
5.1PLC的选择 21
5.2 X/Y 分配表 22
5.3总体程序图 24
5.4初始化及报警程序 25
5.5手动控制程序 26
5.6自动控制程序 27
第六章 软件调试 30
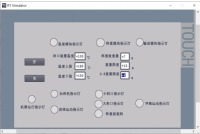
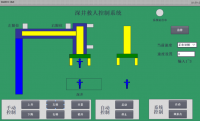
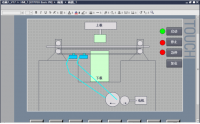
6.1仿真软件的使用 30
6.2运行并调试程序 30
第七章 总结与致谢 33
参考文献 35
第一章 前言
1.1研究的目的及意义
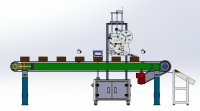
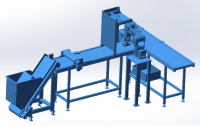
机械手是一种高端产品,是设备自动化更新的需要,能够有效地工作,在先进制造业中发挥着极其重大的作用。它可以运送货物、分拣货物、可以完全的代替人们的辛勤工作,这样大大地降低了众多工人的劳动工作量。可以实现机械化、生产的自动化,可在气温极高、有害气体等环境中保护人的安全,并可大量应用于机械、电子、轻工业、科学研究等领域。随着工业的快速发展,机械手的存在加快了工业发展的脚步。现如今,已经在各个领域中应用都十分广泛。它可以帮助人们①搬运货物、②把物品进行分拣,这样不仅减轻了工人的繁重量,并且在恶劣的特殊环境中还能保护人身安全[5]。PLC系统控制优点有:1.使用可以满足高精度要求2.稳定性好3.在工作中运动准确。操作简单,非专业人员也可以简单编程,提高劳动效率。所以plc可控编程在生产生活中是比较普遍的存在。它可以结合计算机,也可以自主操作,功能很多。本文正在尝试使用PLC对物料分拣机械手实现控制、并利用必要的传感器对不同的颜色按照设定好的程序快速地进行熟练的分拣,动作灵活,适用于多样性产品中的小批量的生产,此外它在柔性的生产中使用也很广泛。PLC的控制系统是一个早已设计好的自动设备。启动设备之后,它可以在炎热的天气中以及环境极其恶劣充满危险的地方反复地,一直地工作。总而言之它在很大程度上可以代替工人的辛勤劳动。如果想要改变产品或者暂时需要接受一个新的任务,机械手可以快速的且容易的改变或设计新的部件,而对于位置的改变,只要重新编程序即可,并能迅速投入到规模较小的生产线上,大大地降低人工装配成本和转换 工作的费用。本设计的环节包括1.系统的设计2.驱动源的设计3.控制部分的设计。其主要是要完成机械手硬件及软件部分的设计。
1.2机械手的发展趋势
机械手大体结构上是模仿人类的手来操作自动机械的,它可以按照工作人员在它内部中设定好的程序来识别来识别并且完成抓取物体动作、再把物体搬运到指定的地方或操控相关的工具来完成某些特定的操作。应用机械手可以从事单一的,重复的以及沉重的劳动。也可以实现生产的集中化和自动化,代替人在对身体有一定伤害的环境下的进行可靠,有效的操作,以此来改变工人的劳动环境,更好地保证了工人的身体健康与安全。
二十世纪七十年代是我国机械手的起步阶段,在此后的三十年,我们实现了从朦胧小生到熟练运用应用的飞跃。那时在我国机械手的大部分的市场都被国外企业所占领着,面对如此强大的国际对手,我国的机械手领域的企业所面临的企业竞争相当巨大。而现在我们国家正逐步从一个“制造的大国”向“制造的强国”不断地前进。如今随着机械手领域的不断发展,已经在很多领域中得到了应用,现如今不仅在采矿、建筑和维修上得到应用在军事应用上、医疗器械上、食品生产加工、生活服务等领域里的机械手的应用也越来越普遍。
机械手主要由手臂和运动机构组成。它可以像人一样通过手臂来抓取用“视觉”识别到一些工具或工件。结构形式具有不同的差距,这些都是根据抓取的物件所在的形状、尺寸的不同、物品所用的材料、大小不同的重量来选择的。常见的旋转、摆动、移动或复合运动都是通过手臂来完成动作的,而它的自由度具有:①上升、②下降、③伸出、④回缩、⑤旋转等运动的方法。6个自由度一般用在为了能准确抓起空间中的任意的位置和无论哪一个的方位的物体。它的自由度使用的越多,机械手就像人手一样越加的灵活,并且它的通用性能越广,相反它的相应的结构也越复杂。
在未来几年里,各种先进技术将被广泛的应用于机械手工作领域,这些技术可以使机械手的应用更加高效、高质量、低运行成本。
1.3主要研究的内容
如今机械手技术的应用日新月异的发展和机械手的设计应用领域也在不断的深化,不仅需要控制可靠性强、高灵活性和良好的操作性、和低成本,还需要带动地方企业的经济发展。本文针对以下几个方面进行研究:
(1)执行系统的设计
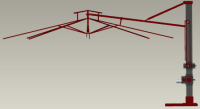
执行系统的组成有传动件和机械部件,它们是完成运动的必要条件。组成有机身,手臂和末端执行部分。每个部分可以有一个乃至多个自由度[1]。本文主要设计两个部分:机械手的手臂和机座。
(2)驱动部分系统的设计
驱动系统是一种设备,它为执行机构的所有部分提供能量。通过在驱动系统中三种方式的比较,最终选择了气动驱动方式作为本文的驱动部分。内容包括1、对元器件的选型2、伸缩气缸直径的选择3、气动回路的设计。
(3)控制系统的设计
控制系统是整篇文章中的最重要的系统,带动着驱动部分的运动,使整个的执行机构按照规定的要求和时间进行工作。它的主要内容包括①、PLC的选型、②、检测系统的设计、③ I/O口的选择 ③元器件的清单表、④梯形图绘图、自动程序等。
参考文献
[1]徐灏.机械设计手册【M】,北京:机械工业出版社,2003.
[2]鄂大辛.液压传动与气压传动[M].北京:北京理工大学出版社,2007.276~294.
[3]朱梅,朱光力.液压与气动技术[M].西安:西安电子科技大学出版社,2007.177~201.
[4]张建明.机电一体化系统设计[M].北京:高等教育出版社,2001.96~140.
[5]齐进凯.气动机械手的结构设计、分析及控制的研究[D].上海:东华大学,2006
[6]章文浩.可编程控制器原理及实验[M].北京:国防工业出版社,2003.56~90.
[7]林伟.向晓汉. 机械设计基础 [M].第一版本.电子工业出版,2015.2.
[8]万理想,丁保华,徐军,滕孝来,胡明.PLC在物料分拣机械手控制中的应用[J].徐州:中国矿业大学,2007
[9]常晓玲.电气控制系统与可编程控制器[M].北京:机械工业出版社,2004.170~226.
[10] 陈平.张双侠.尹利平. 《AutoCAD2010 基础与实例教程》.第一版本.机械工业出版社,2011.1.



