





















水力清砂机械手系统设计
摘要
由于工业自动化程度的不断提高,工业现场的很多易燃、易爆等高危及重体力劳动场合将由机器人代替。这一方面可以减轻工人的劳动强度,另一方面可以大大提高劳动生产效率。例如,铸工车间中铸工期间所产生的粘砂残留在铸件表面上,这时就需要采用喷枪进行粘砂的清理。随着长期的从事清砂操作,工人中出现铸工尘肺,为了降低铸工尘肺的发生率,水爆清砂和水力清砂等工艺就出现在了研究课题之中。
本课题是一个机、电结合较为紧密的实用性项目,文中对PLC的应用、机械结构的设计、控制方法的选择等方面进行了必要的探讨。最后,总结了全文,指出了机械手的改进措施、应用前景和发展方向。
关键字:机械手,液压驱动,PLC(可编程控制器)
Abstract
With the improvement of the industrial automation, industrial site a lot of flammable, explosive and other high risk of heavy physical labour will be replaced by robots. This can reduce the labor intensity of workers, on the other hand can greatly improve labor productivity. For example, the generated during zhugongzhugong workshop sand residues on the surface of the casting, then you need to use the gun sand cleaning. As long engaged in cleaning operation, founder pneumoconiosis workers, in order to reduce the founder pneumoconiosis incidence in water blast cleaning, sand and water cleaning process on the research topic.
This topic is a machine, combined with practical projects more closely, in this paper, the application of PLC, the design of mechanical structure, control methods and other aspects of the necessary study. Finally, summarized the full text, points out the improvement measures, manipulator application prospect and development direction.
Keywords: hydraulic drive manipulator,, PLC (programmable logic controller)
目录
摘要 I
Abstract I
第1章 绪论 - 1 -
1.1 选题的背景及意义 - 1 -
1.2 国内外研究现状和发展的趋势 - 1 -
1.3 本设计研究的主要内容 - 3 -
第2章 机械手总体的设计 - 5 -
2.1 机械手的组成及各部分关系概述 - 5 -
2.2 机械手的设计分析 - 5 -
2.2.1 设计的要求 - 5 -
2.2.2 总体设计分析 - 5 -
2.2.3 总体方案拟定 - 7 -
第3章 机械手结构的设计分析 - 9 -
3.1 末端操作器的设计分析 - 9 -
3.2 手腕的设计分析 - 9 -
3.3 手臂的设计分析 - 9 -
3.4 机身和机座的设计分析 - 10 -
第4章 机械手各部件的载荷计算 - 12 -
4.1 设计要求分析 - 12 -
4.2 手臂伸缩机构载荷的计算 - 12 -
4.3 手臂俯仰机构载荷的计算 - 13 -
4.4 机身摆动机构载荷力矩的计算 - 13 -
4.5 初选系统工作压力 - 14 -
第5章 机械手各部件尺寸计算及校核 - 16 -
5.1 手腕油缸尺寸的确定 - 16 -
5.2 手臂伸缩机构结构尺寸的确定 - 19 -
5.3 手臂俯仰机构结构尺寸的确定 - 19 -
5.4 机身摆动机构的确定 - 19 -
5.5 强度校核 - 19 -
5.6 弯曲稳定性校核 - 20 -
第6章 液压系统的设计 - 22 -
6.1 制定基本的方案 - 22 -
6.1.1 系统基本回路选择 - 22 -
6.2 各液压元件选择 - 22 -
6.2.1 液压泵的选择 - 22 -
6.2.2 液压泵所需电机功率的选择 - 24 -
6.2.3 液压阀的确定 - 24 -
6.2.4 液压辅助元件的选择原则 - 25 -
6.2.5 油箱容量的说明 - 27 -
6.2.6 液压原理图 - 27 -
第7章 PLC控制系统设计 - 29 -
7.1 PLC控制系统结构的组成 - 29 -
7.2 PLC选型 - 29 -
7.3 其他硬件及选型 - 29 -
7.4 PLC I/0的分配表及接线图 - 31 -
7.5 控制流程图及相关程序 - 32 -
结论 - 35 -
参考文献 - 36 -
附录 - 37 -
第1章 绪论
1.1 选题背景及其意义
由于工业自动化程度的不断提高,工业现场的很多易燃、易爆等高危及重体力劳动场合将由机器人代替。这一方面可以减轻工人的劳动强度,另一方面可以大大提高劳动生产率。例如,铸工车间中铸工期间所产生的粘砂残留在铸件表面上,这时就需要采用喷枪进行粘砂的清理。随着长期的从事清砂操作,工人中出现铸工尘肺,为了降低铸工尘肺的发生率,水爆清砂和水力清砂等工艺就出现在了研究课题之中。
该机械手用于铸工车间水力清砂,由于铸件的形状和尺寸不同,应清理的部位变化较大,就要求机械手有一定的通用性。机械手所操持的水力喷枪,能模仿人手操作时的动作,手臂能实现前后左右上下运动。
通过本课题,让学生在毕业设计过程中综合大学所学基础课程及专业课程,培养学生综合应用所学知识和技能去分析和解决一般工程技术问题的能力;进一步培养学生分析问题、创造性地解决实际问题的能力。
本课题中水力清砂机械手系统主要采用液压驱动。
1.2 国内外研究现状与发展趋势
(1)国内的研究现状
工业机械手最早应用在汽车制造工业,常用于焊接、喷涂、装配和搬运。工业机械手扩大了人的手足及大脑功能,它可替代人从事危险、有害、有毒、低温和高温等恶劣环境中工作:代替人完成辛苦、繁重的劳动,在提高劳动生产率的同时保证了产品的质量。目前主要应用于制造业中,特别是电器制造、汽车制造、塑料加工、通用机械制造及金属加工等工业。工业机械手与数控加工中心,自动搬运小车与自动检测系统可组成柔性制造系统和计算机集成制造系统,实现生产的自动化。由于生产的发展,机械手的功能和性能不断得到改善和提高,它的应用领域也日益增大。
我国在20世纪70年代开始研究并开发工业机械手。1972年我国第一台机械手开发于上海,随后全国各省都开始了对机械手的应用和研制。从第七个五年计划开始,我国政府就将工业机器人的发展列入其中,并且为此项目投入大量的资金,研究开发并且制造了一系列的工业机器人,有由北京机械自动化研究所设计制造的喷涂机器人,广州机床研究所和北京机床研究所合作设计制造的点焊机器人,大连机床研究所设计制造的氩弧焊机器人,沈阳工业大学设计制造的装卸载机器人等等。这些机器人的控制器,都是由中国科学院沈阳自动化研究所和北京科技大学机器人研究所开发的,同时一系列的机器人关键部件也被开发出来,如机器人专用轴承,减速器,驱动器,控制器,减震齿轮,直流伺服电机,编码器,DC——PWM等等。
我国的工业机械手发展主要是逐步扩大其应用范围。在应用专业机械手的同时,相应的发展通用机械手,研制出示教式机械手、计算机控制机械手和组合式机械手等。可以将机械手各运动构件,如伸缩、摆动、升降、横移、俯仰等机构,设计成典型的通用机构,以便根据不同的作业要求,选用不用的典型机构,组装成各种用途的机械手,即便于设计制造,又便于跟换工件,扩大了应用范围。目前国内机械手主要用于机床加工、锻造。热处理等方面,数量、品种、性能方面都不能满足工业生产发展的需要。所以,在国内主要是逐步扩大应用范围,重点发展铸造、热处理方面的机械手,以减轻劳动强度,改善作业条件,在应用专业机械手的同时,相应的发展通用机械手,有条件的要研制示教式机械手、计算机控制机械手和组合机械手等。同时要提高速度,减少冲击,正确定位,以便更好的发挥机械手的作用。此外还应大力研究伺服型、记忆再现型,以及具有触觉、视觉等性能的机械手,并考虑与计算机连用,逐步成为整个机械制造系统中的一个基本单元。
(2)国外研究现状
国外机械手在机械制造行业中应用较多,发展也很快。目前主要用于机床、横锻压力机的上下料,以及点焊、喷漆等作业,它可按照事先指定的作业程序来完成规定的操作。国外机械手的发展趋势是大力研制具有某种智能的机械手。使它具有一定的传感能力,能反馈外界条件的变化,作相应的变更。如 发生少许偏差时候,即能更正并自行检测,重点是研究视觉功能和触觉功能。目前已经取得一定的成绩。
1962年,美国联合控制公司在上述方案的基础上,又试制成一台数控示教再现型机械手。运动系统仿造坦克炮塔,臂可以回转、俯仰、伸缩,用液压驱动;控制系统用磁鼓做储存装置。不少球面坐标式机械手就是在这个基础上发展起来的;同年该公司和普曼公司合并成为万能制动公司,专门生产工业机械手。1962年美国机械铸造公司也实验成功一种叫Versatran机械手,原意是灵活搬运,可做点位和轨迹控制:该机械手的中央立柱可以回转、升降、伸缩,采用液压驱动,控制系统也是示教再现型。虽然这2种机械手出现在六十年代初,但都是国外机械手发展的基础。从60年代后期起,喷漆、弧焊工业机器人相继在生产中开始应用。1978年美国Unimate公司和斯坦福大学、麻省理工学院联合研制出一种Unimation—Vic.arm型工业机械手,装有小型电子计算机进行控制,用于装配作业。联邦德国机器制造业是从1970年开始应用机械手,主要用于起重运输、焊接和设备的上下料等作业:联邦德国Kuka公司还生产一种点焊机械手,采用关节式结构和程序控制;日本是工业机器人发展最快,应用国家最多的国家,自1969年从美国引进两种典型机械手后,开始大力从事机械手的研究,目前以成为世界上工业机械手应用最多的国家之一。前苏联自六十年代开始发展应用机械手,主要用于机械化、自动化程序较低、繁重单调、有害于健康的辅助性工作。
(3)发展趋势
现代汽车制造工厂的生产线,尤其是主要工艺的焊接生产线,大多采用了气动机械手。车身在每个工序的移动;车身外壳被真空吸盘吸起和放下,在指定工位的夹紧和定位;点焊机焊头的快速接近、减速软着陆后的变压控制点焊,都采用了各种特殊功能的气动机械手。
目前世界高端工业机械手均具有高精化,高速化,多轴化,轻量化等的发展趋势。定位精度可以满足微米及亚微米级要求,运行速度可以达到3M/S,良新产品可以达到6轴,负载2KG的产品系统总重已突破100KG。更重要的是将机械手、柔性制造系统和柔性制造单元相互结合,从而根本改变目前机械制造系统的人工操作状态。同时,随着机械手的小型化和微型化,其应用领域将会突破传统的机械领域,从而向着电子信息、生物技术、生命科学及航空航天等高端行业发展。
1.3 本设计主要研究的内容
1、机械部分
机械手的执行机构,由手爪、手腕、手臂、支座组成。手爪是抓取机构,用来夹紧或是松开喷枪,与人的手指相似。手腕是连接手指和手臂的元件,可以进行俯仰动作。手臂的动作和手腕相类似,但动作范围会更大,可以前后伸缩,上下俯仰和左右摆动等。支柱是用来支撑手臂的,它是固定的。
(1)机械结构部分
1.运动形式方案选择
为实现不同动作,应选取不同方案。本课题已确定采用球坐标机构。
2.机身结构
机身采用回转与俯仰结构机身。实现回转的驱动方案有几种,摆动油缸驱动,升降油缸在上,回转油缸在下。实现机身回转采用液压马达驱动。
3.手臂结构
手臂的运动方式为左右转动、前后伸缩及上下摆动,其中上下摆动采用手臂俯仰油缸与活塞杆机构连用来实现,手臂的前后伸缩用直线缸来实现。
4.手腕结构
手腕的设计,选择单自由度手腕。手腕的俯仰动作由液压马达直接驱动。
(2)机械手驱动方案
采用液压驱动,液压实现机身的回转与俯仰,以及各部件的伸缩俯仰运动。为实现机身的旋转,选用液压马达驱动。手腕俯仰也采用液压马达驱动。手臂伸缩与俯仰都采用液压缸驱动。
参考文献
[1] 郭洪红.工业机器人运用技术[M].北京:科学出版社.2008-7.7~11,15,19,26~30,40,44~45,51,68,79~84,91
[2] 原魁.工业机器人发展现状与趋势[J].工厂自动化.2007.第1期.34~38
[3] 周寿明,邓成良.可用于生产线的工业机器人研究[J].科技创新导报.2008.第27期.59-61
[4] 罗璟,赵克定,陶湘厅,袁锐波.工业机器人的控制策略探讨[J],机床与液压.2008-10.第10期.95~100
[5] 张新聚,曹慧勤,杨雪.程控通用机器人设计[J].液压与气动.2007.第2期.63~64
[6] 李文明.水力清砂机械手的研究与设计[D].武汉:华中科技大学.2007
[7] 郭洪红.工业机械人技术[M].西安:西安电子科技大学.2006.5
[8] 王小玲.工业机械手的PLC控制[J].机电工程技术.2004.第9期.32~36
[9] 许福玲,陈尧明.液压与气压传动[M].北京:机械工业出版社.2007-10
[10] 成大先.机械设计手册液压传动[S],第4版.北京:化学工业社.2007-9
[11] 机械设计手册编委会.机械设计手册液压传动与控制[S],第4版.北京:机械工业出版社.2007-7
[12] 张培志,朱宏俊.电气控制与可编程序控制器[S].北京:化学工业出版社.2009-1.120
[13] 哈尔滨工业大学理论力学教研室.理论力学[S],第6版.北京:高等教育出版社.2007-4.109,170~177
[14] 刘鸿文.材料力学[S],第4版.北京:高等教育出版社.2008-12.12-25,29-37
[15] 孙桓,陈作模,葛文杰.机械原理[S],第7版.北京:高等教育出版社.2007-12.5~18,263~273
[16] 毛平淮,互换性与测量技术[S].北京:机械工业出版社.2008-1
[17] Fathi Ghorbel, John Y. Hung, and Mark W. Spong. Adaptive Control of Flexible-Joint Manipulators. IEEE Control Systems Magazine, 1989.10, 9-13
[18] D. Black. A Modular Approach to Robotic Automation of DOE Applications. ARM Automation,Inc 2000.7
附录一 PLC接线图
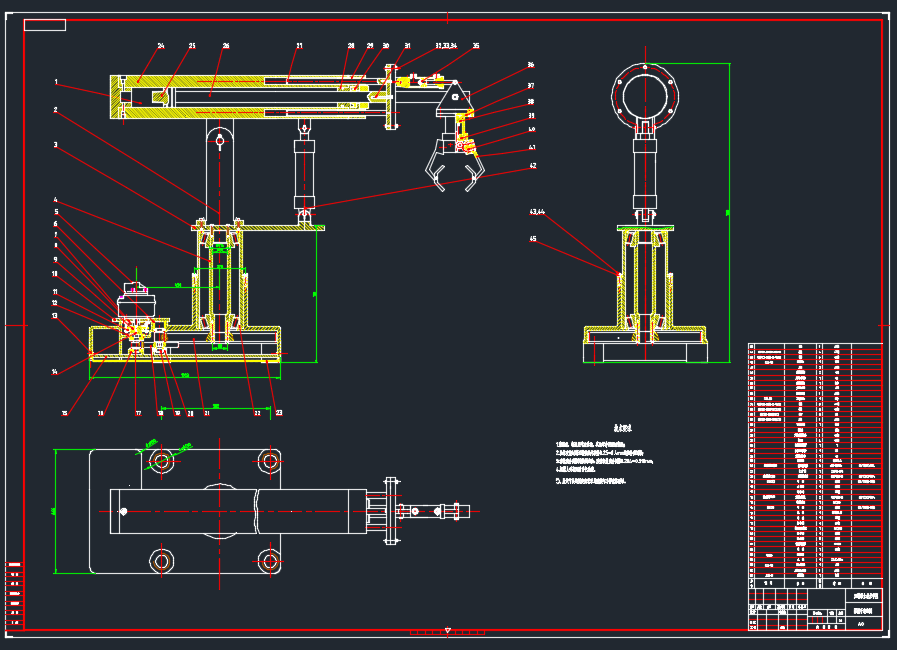
附录二 机械手装配图
附录三 手抓
附录四 手臂简图
附录五 底座
附录六 立柱
附录七 小齿轮
附录八 升降油缸
附录九 液压原理图




